
L’homme virtuel au service de l’ergonomie au travail

À l’heure où la modélisation virtuelle de systèmes complexes ne cesse de progresser, la machine ultra-complexe que représente le corps humain n’échappe pas à cette numérisation de la réalité. Les domaines de recherche et les défis sont vastes quand il s’agit de reproduire certaines facettes du comportement sensori-moteur de l’humain au moyen d’un outil de simulation virtuel :
- Du squelette anatomique à l’enveloppe corporelle;
- De la prédiction posturale à la prédiction dynamique;
- De l’expérience de l’utilisateur à l’autonomie de l’humain virtuel face à une situation.
Le mannequin digital, ou l’avatar sont autant de termes utilisés pour parler de l’homme numérique dans des domaines aussi variés que la médecine, l’industrie, l’ergonomie, les arts et les jeux vidéo. Dans cet article, nous allons particulièrement nous intéresser au domaine de l’ergonomie virtuelle et à celui du DHM (Digital Human Modeling) grâce au projet Smart Posture Engine, amorcé par l’équipe du professeur Rachid Aissaoui du laboratoire de recherche en imagerie orthopédique (LIO) et en collaboration avec l’entreprise 3DS (Dassault Systèmes).
Figure 1 Sia et Téo sont les nouveaux mannequins de la V6 Delmia pour l’analyse ergonomique virtuelle en 3D
3DS est une entreprise spécialisée depuis plus de 20 ans dans les logiciels de conception assistée par ordinateur (CAO) et les solutions de gestion de cycles de vie d’un produit (PLM, Product Lifecycle Management). Leur produit DELMIA est un ensemble de solutions permettant de simuler l’environnement d’une usine afin de définir, planifier, créer, surveiller et contrôler virtuellement tous les processus de production. En somme, DELMIA permet de modéliser en trois dimensions les processus complexes existant dans une usine manufacturière telle que Bombardier, Boeing, Airbus, Honda, Toyota, etc.
Ergonomie virtuelle en aéronautique
Ergonomie virtuelle en construction
Le but du projet Smart Posture Engine est d’améliorer le positionnement des mannequins virtuels de DELMIA en intégrant des comportements physiologiques s’appuyant sur les dernières avancées de la biomécanique. Une équipe pluridisciplinaire participe au projet : des étudiant(e)s et chercheur(e)s de l’École de technologie supérieure (ÉTS) de Montréal et de l’École Polytechnique de Montréal ainsi que l’équipe Ergonomie Virtuelle de 3DS.
Les grandes étapes du projet sont :
- Compréhension approfondie du moteur de positionnement actuel de DELMIA pour en trouver les limitations et pouvoir y apporter des améliorations.
- Conception dans le logiciel Matlab (Mathworks, USA) d’un environnement de tests reproduisant le mannequin virtuel de DELMIA et permettant ainsi de programmer et de tester les diverses fonctionnalités du moteur de positionnement.
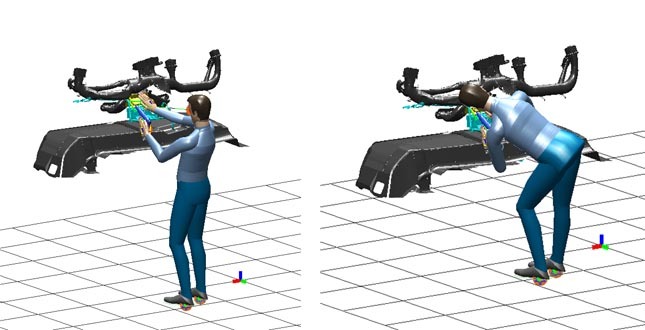
Figure 2 Mannequin Delmia V5 dans l’environnement Matlab de développement et tests
- Étude en profondeur des articulations du corps humain, ajout de contraintes sur la coordination multi-articulaire (par exemple la dynamique de déplacement de l’épaule, les couplages vertébraux) pour des postures plus réaliste qui permettent ainsi de régler plusieurs problèmes identifiés par l’équipe 3DS.
(À gauche) Clavicule actuelle de Delmia V5 caractérisée par uen mobilité exagérée et une absence de coordination clavicule-humérus. (À droite) Clavicule incluant une coordination clavicule-humérus et une mobilité plus réaliste, réduisant ainsi la redondance de la chaîne cinématique et l’oscillation de la clavicule.
- Création d’un indice d’équilibre du mannequin virtuel afin de quantifier la stabilité de la posture prédite.
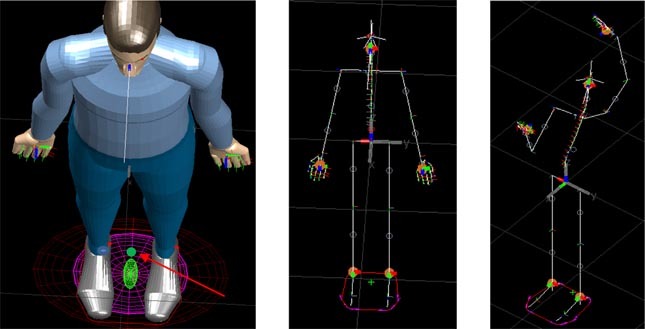
Figure 3 Mannequin Delmia sous Marlab avec indice d’équilibre (point vert) et polygone de sustentation (surface magenta)
- Développement d’une méthode pour éviter les collisions du mannequin avec lui-même et avec son environnement.
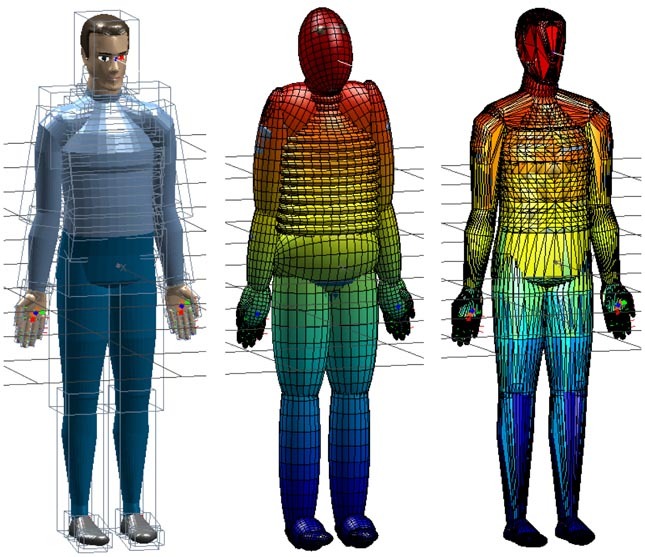
Figure 4 Mannequin Delmia sous Matlab avec volumes englobants pour le test des collisions : OBB (à gauche), ellipsoïdes (au centre) et convex hull (à droite).
- Création d’un indice de vision du mannequin virtuel basé sur l’acuité visuelle issue du domaine de l’optométrie.

Figure 5 Mannequin Delmia sous Matlab. À gauche, ligne de vision (en cyan), volume de vision proche (en magenta) où le mannequin peut se positionner pour voir la lettre E (en noir sur le carré blanc). À droite, contrainte en vision précise sur un objet de 9 mm.
- Étude de la relation entre la main du mannequin et les objets à saisir : définition des modes de saisies (grasp)
- Reconnaissance et caractérisation des objets à saisir par le mannequin
Deux post-doctorants du LIO, Arnaud Barré et Pierre-Olivier Lemieux, travaillent ensemble sur les grands axes du projet. Cinq étudiants à la maîtrise en Technologie de la Santé (Benjamin Milluy, Matthieu Cauffiez, Niels Einstein, Quentin Bourret et Yann Halgand) effectuent (ou ont effectué) leurs projets de 15 crédits dans les locaux de chez 3DS.
Si vous avez envie d’en découvrir plus sur le monde du Digital Human Modeling, venez assister à la conférence DHM2016 qui aura lieu les 15, 16 et 17 juin 2016 à l’ÉTS.
[accordion title= »Partenaires et intervenants » close= »1″]
LIO (Laboratoire de recherche en imagerie et orthopédie)
Équipe du LIO
Responsable du projet : Rachid Aissaoui
Professeur au département GPA ([email protected])
Co-chercheurs : Nicola Hagemeister et Jacques de Guise
Professeurs au département GPA
Laetitia De Polo, coordinatrice de projet, École de Technologie Supérieure (ÉTS)
Arnaud Barré, post-doctorant, GPA, École de Technologie Supérieure (ÉTS)
Pierre Olivier Lemieux, post-doctorant, GPA, École de Technologie Supérieure (ÉTS)
Benjamin Milluy, étudiant à la maîtrise en génie concentration technologies de la santé, École
de Technologie Supérieure (ÉTS)
Niels Eilstein, étudiant à la maîtrise en génie concentration technologies de la santé, École de
Technologie Supérieure (ÉTS)
Matthieu Cauffiez, étudiant à la maîtrise en génie, École de Technologie Supérieure (ÉTS)
Quentin Bourret, étudiant à la maîtrise, École de Technologie Supérieure (ÉTS)
ÉTS
Louis Rivest, Professeur au département GPA
Yann Halgand, étudiant à la maîtrise, École de Technologie Supérieure (ÉTS)
Équipe Polytechnique
Daniel Imbeau, Professeur
Sahar Arab, étudiante au doctorat
3DS (Dassault Systèmes), DELMIA
Équipe 3DS
Julie Charland, directrice Ergonomie Virtuelle, 3DS
Jean-François Veaux-Logeat, directeur R&D Applications d’Ergonomie, 3DS
Hugues Carron
David Brouillette
[/accordion]


