
De véritables solutions pour la robotique industrielle
L’image d’entête provient d’ilian Bonev. La licence CC de Substance s’applique.
Il y a peu de temps, nous publiions Des robots vraiment précis, article qui présentait les activités de recherche d’Ilian Bonev, professeur au Département de génie de la production automatisée de l’ÉTS, dans le cadre de la Chaire de recherche en robotique de précision. L’article qui suit présente les autres activités de recherches du prof. Bonev à savoir :
- les robots parallèles;
- les robots collaboratifs;
- RoboDK, un logiciel de programmation hors ligne de robots industriels;
- Mecademic, une entreprise de robots industriels ultracompacts.
Les robots parallèles
La quasi-totalité des robots industriels est de type sériel. Dans un robot sériel, chaque segment est relié au segment suivant par un moteur. Le désavantage d’une architecture sérielle est que tous les moteurs portent le poids des segments et des autres moteurs situés plus loin, vers l’extrémité. Le premier moteur, celui à la base du robot, porte donc tout le poids des moteurs et des segments du bras.
Les robots parallèles, au contraire, sont composés de plusieurs séries de segments, reliés par des articulations habituellement non motorisées. Ces robots, beaucoup moins courants dans l’industrie, ont comme avantage de pouvoir soulever des charges beaucoup plus lourdes que les robots sériels.
Des robots vraiment précis présente un premier exemple de robots parallèles conçus par le prof. Bonev. Ce robot actionné par câbles (figure 3 et vidéo 5) est utilisé pour appliquer une force et un moment sur l’effecteur d’un autre robot lors de l’étalonnage. Le professeur Bonev, reconnu mondialement dans le domaine de la robotique parallèle, a aussi conçu plusieurs d’autres robots parallèles, dont la plupart sont extrêmement précis (PreXYT, DexTAR, MicARH). Le professeur Bonev assemble actuellement un autre robot parallèle à six axes pour l’usinage de petites pièces.
Vidéo 1 Robot en assemblage pour l’usinage de petites pièces
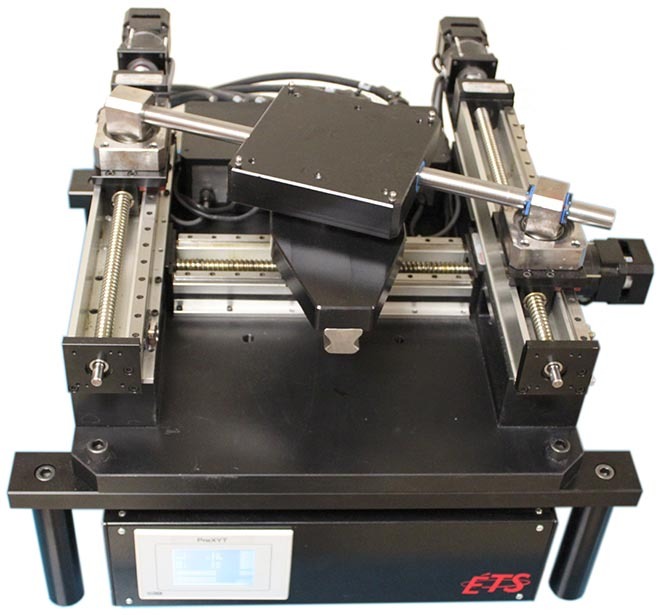
Figure 1 PreXYT—robot parallèle de positionnement précis dans le plan (XY-thêta)

Figure 2 DexTAR—robot parallèle de transfert ultrarapide (XYZ)
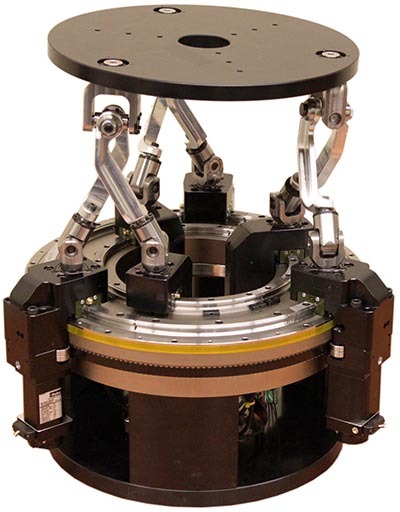
Figure 3 MicARH—hexapode de positionnement précis dans l’espace
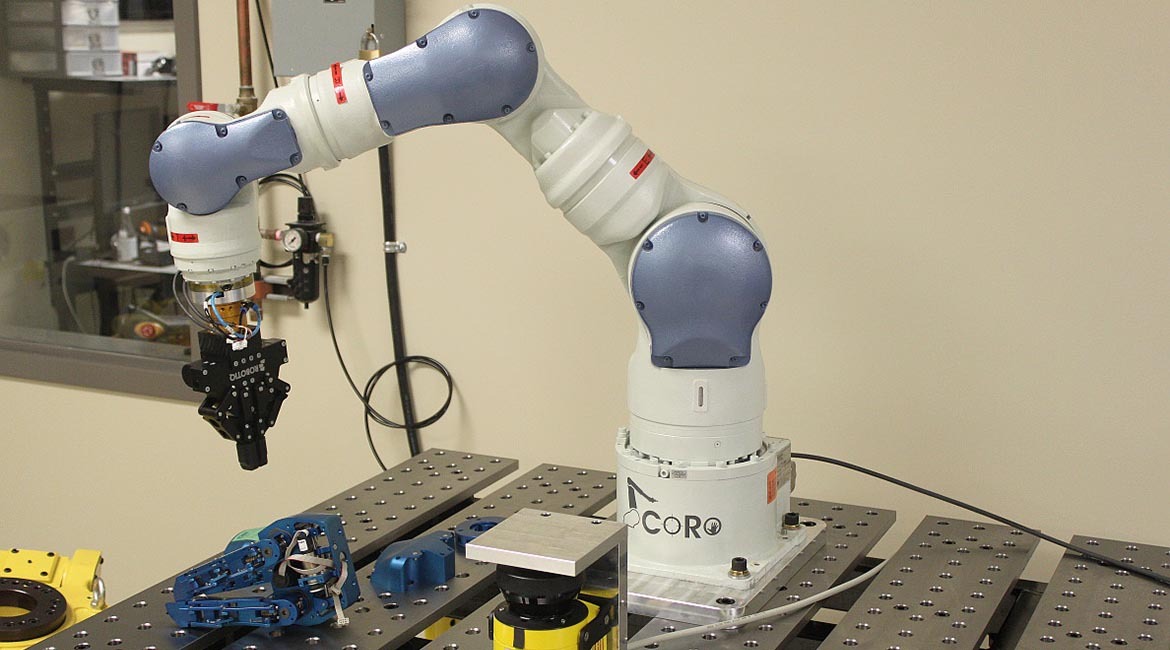
Les robots collaboratifs
Les robots industriels traditionnels sont précis et rapides, mais aussi dangereux. On les garde derrière des barrières de sécurité, ce qui ne permet pas généralement l’interaction directe avec un opérateur lors de leur fonctionnement.
Puisqu’il est trop difficile d’automatiser à 100 % plusieurs tâches, surtout dans les PME, un nouveau type de robots, plus sûrs, existe depuis quelques années : le robot collaboratif. Ces robots sont conçus pour fonctionner sans barrière, tout près des êtres humains. Comme ils sont principalement utilisés dans les PME, on a tout avantage à en faciliter la programmation, mais aussi à s’assurer qu’ils sont réellement sûrs une fois implantés.
Ces robots soulèvent beaucoup de questionnements quant à leur sécurité. Le risque zéro n’existe pas. Quels risques sommes-nous prêts à accepter et lesquels jugeons-nous inacceptables? La limite est encore floue. Le professeur Bonev travaille à analyser les risques inhérents à ces robots afin d’émettre des recommandations d’utilisation.
Vidéo 2 Analyse de risques d’un robot UR5 d’Universal Robots
Le Prof. Bonev développe également des méthodes de programmation plus intuitives. À titre d’exemple, son équipe a créé une interface pour commander des robots ABB au moyen de brassards Myo.
Vidéo 3 Robot commandé de façon intuitive par deux bracelets
Actuellement, il développe une autre interface à l’aide du dispositif de réalité virtuelle HTC Vive :
Vidéo 4 Robot commandé par HTC Vive
Enfin, le Prof. Bonev travaille sur l’utilisation d’un robot collaboratif de la compagnie KUKA qui effectue des échographies automatisées (vidéo à venir).
RoboDK
Pour améliorer l’enseignement offert dans le cadre du cours de robotique industrielle, le prof. Bonev et l’un de ses étudiants diplômés ont conçu un logiciel de simulation 3D, RoKiSim. Ce logiciel a par la suite servi de base pour créer un logiciel de simulation et de programmation hors ligne très populaire, RoboDK.
Vidéo 5 RoboDK
Ce logiciel offre en plus la possibilité d’étalonner un robot à l’aide d’un dispositif de poursuite au laser (laser tracker). Il est déjà utilisé dans des dizaines d’entreprises partout dans le monde.
Vidéo 6 Étalonnage d’un robot industriel à l’aide de RoboDK
Mecademic
L’entreprise Mecademic a été créée par l’un des étudiants d’Ilian Bonev, Jonathan Coulombe, et par le prof. Bonev initialement pour commercialiser le robot DexTAR. Le marché visé à l’origine était celui de l’enseignement universitaire. Jonathan Coulombe s’est rapidement rendu compte que le marché industriel offrait plus de potentiel de croissance : il a lancé son produit phare, le Meca500. Ce robot sériel à six axes, extrêmement petit, compact et précis, est aussi très facile à utiliser. Le Meca500 est déjà utilisé partout en Amérique du Nord, en Europe et en Asie pour des applications aussi variées que l’horlogerie, la chirurgie animale, les tests et l’inspection de composantes électroniques, et la fabrication.
À suivre…
Les travaux d’autres professeurs de l’ÉTS œuvrant dans le domaine de la robotique (Vincent Duchaine, Ruxandra Botez, Maarouf Saad, Guy Gauthier et autres) suivront sous peu.


