
Real-Time Testing of a Morphing Wing Model in a Wind Tunnel

Editor’s Note
The morphing wing concept is a promising possibility in decreasing overall drag, thereby reducing aircraft fuel consumption and pollution emissions. The authors are presenting an actuator position controller, where the structure is modeled using the proportional fuzzy logic technique.
Introduction
By the year 2020, following the report from the European Commission in Aeronautics, new airliners will have to reduce emissions of carbon dioxide (CO2) by 50% and nitrogen oxide (NOx) by 80%, in relation to the levels registered in 2005 [1]. One possible solution is the morphing wing concept, which is being increasingly considered to save fuel and reduce emissions. Different types of morphing wing designs are explained in details in reference [2].
This project is an extension of the Morphing Wing Design to Reduce Airplane Fuel Consumption project, which presented the scale model of the ATR-42 aircraft wing, designed, manufactured, and installed at the research laboratory in Active Controls, Avionics and Aeroservoelasticity, LARCASE, and studied in the test chamber of the Price-Païdoussis wind tunnel of the LARCASE ([3], [4]).
Morphing Wing Model
The main objective of the project is to decrease overall drag, thereby reducing aircraft fuel consumption. One way to achieve this drag decrease is to delay the transition between the laminar flow and the turbulent flow. In this way, a greater laminar flow on the entire upper surface of the wing can be achieved. Figure 1 shows the wing model.
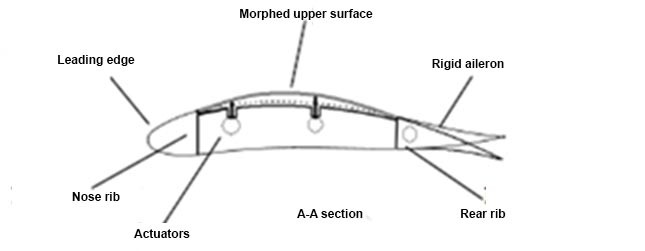
Figure 1 Model of the wing airfoil
Electrical actuators, along with an aileron at the wing tip, are used to morph the upper surface of the wing. The upper surface is made of composite materials. The internal structure was numerically optimized prior to the manufacturing of the entire wing. Figure 2 shows the completed wing for the wind tunnel tests.
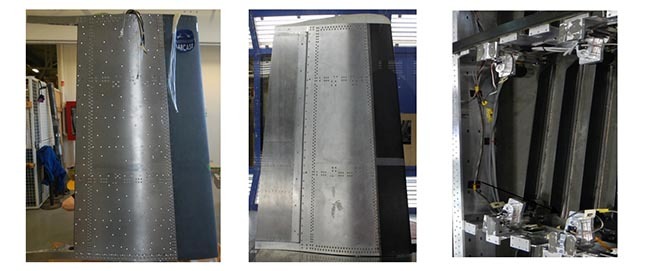
Figure 2 Model of the wing manufactured and tested in the wind tunnel. Right, a wing model without aileron. Center, a wing model with aileron. Left, iInternal structure of the demonstrator.
The morphing wing actuators are generally controlled through different systems running various types of control logics; many forms of control logic were tested and developed at the LARCASE ([5] – [16]).
Methodology
In the present research, the positions of the electric actuators are controlled for each flight case. The actuation is made possible with the development of robust and rapid control systems. The structure of the control loop is shown in Figure 3.

Figure 3 Structure of the control loop
The control loop shown in Figure 3 includes three sub-loops. Its special feature is the ability to take into account the encoder signal in order to synchronize its displacement with the displacement of the position sensor signal (LVDT).
The outer loop based on the position sensor (LVDT) has a dual role:
- Controlling the position of the morphing part;
- Compensating clearance in the actuator.
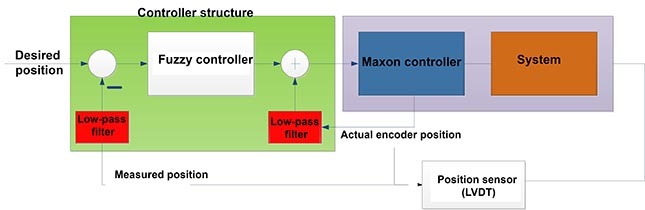
Figure 4 Controller structure based on the LVDT
The structure of the actuator position control is modeled using the proportional fuzzy logic technique, of which the input variable of the membership functions can be seen in Figure 5.
The controller input variable is calculated with the error between desired position and measured position. Filters are introduced in order to eliminate the noise in the measured signals (LVDT and encoder).
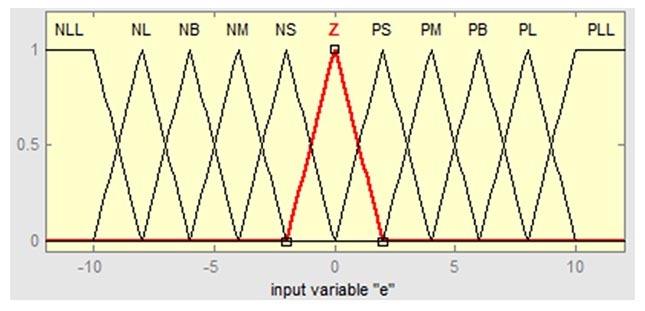
Figure 5 Membership function
After defining the control logic, it was implemented in a real-time system (calculation unit) to be tested experimentally.
Tests Carried Out on the Morphing Wing Model
The experimental validation was performed first on the test bench at the LARCASE, in the absence of winds. Afterwards, the demonstrator was tested in the Ottawa NRC wind tunnel, in the presence of winds. Figure 6 shows the demonstrator wing installed in the test chamber of the NRC subsonic wind tunnel. Results of the control observed in the wind tunnel are presented in Figure 7.
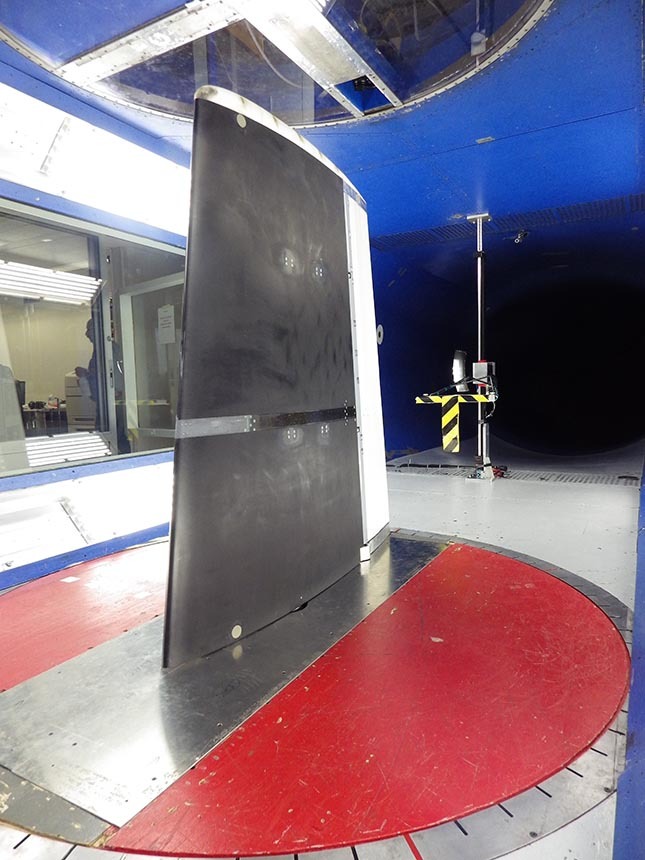
Figure 6 Demonstrator installed in the test chamber
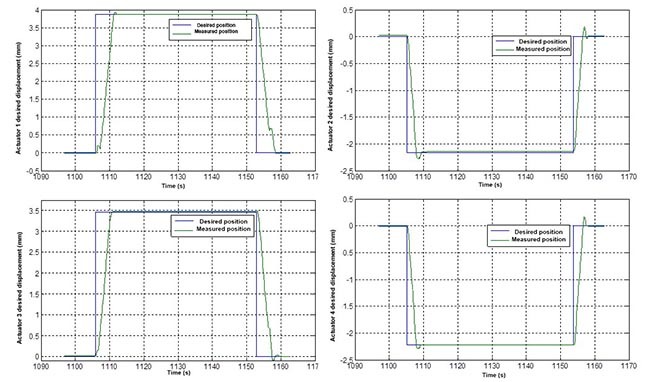
Figure 7 Actuator displacements
The actuator response time is approximately 1.5 seconds per millimeter, in the presence of winds. The overshoot is less than 5% of the desired value and the static error is less than 0.1 millimeter. The static error is in fact the final error between the desired value and the measured value once the transient state is finished. Therefore, the static error is calculated when the system is completely stable.
In conclusion, it has been demonstrated that the controller has actively increased the region of the laminar flow.
More details on the methodologies used in optimizing aerodynamic forms of the demonstrator, as well as its actuation, can be found in references [17] and [27].
Additional Information
This application of the morphing wing concept is part of the MDO-505 international research project of the CRIAQ, conducted in the research laboratory in Active Controls, Avionics and Aeroservoelasticity (LARCASE), in collaboration with Bombardier Aerospace and Thales in Canada. Teams from the École Polytechnique de Montréal, and the IAR-NRC also participated in this project, as well as Italian researchers from the University of Naples Frederico II, the CIRA (Italian Aerospace Research Centre), and Alenia.
For more information, please refer to the following research article:
Tchatchueng Kammegne, M. J., Grigorie, L. T., Botez, R. M., 2015, « Design, Numerical Simulation and Experimental Testing of a Controlled Electrical Actuation System in a Real Aircraft Morphing Wing Model » The Aeronautical Journal, Vol. 119 (1219).


