Tests en temps réel d’un démonstrateur d’aile déformable en soufflerie

Note de l’éditeur
Le concept de l’aile déformable est une avenue prometteuse pour réduire la traînée globale et ainsi diminuer la consommation de carburant et les émissions polluantes des avions. Les auteurs présentent ici un contrôleur de position des actionneurs dont la structure est modélisée par la technique de logique floue proportionnelle.
Introduction
Pour l’année 2020, suivant le rapport de la Commission européenne en aéronautique, les nouveaux avions de ligne doivent réduire leurs émissions de dioxyde de carbone (CO2) de 50 % et celles d’oxyde d’azote (NOx) de 80 % par rapport aux niveaux enregistrés en 2005 [1]. Parmi les solutions possibles, le concept de « l’aile déformable » est de plus en plus envisagé pour économiser le carburant et réduire les émissions. Différents types de concepts d’aile déformable sont expliqués en détail dans [2].
Ce projet s’inscrit dans la continuité d’un projet antérieur, Une aile déformable d’avion pour réduire la consommation de carburant qui présentait le modèle à échelle réduite d’une aile d’avion ATR-42, conçu, fabriqué, installé au Laboratoire de recherche en commande active, avionique, et aéroservoelasticité LARCASE et ensuite testé dans la chambre d’essais de la soufflerie Price-Païdoussis du LARCASE ([3], [4]).
Modèle de l’aile déformable
L’objectif principal du projet est la réduction de la traînée globale afin de réduire la consommation en carburant des avions. Un des moyens de réaliser cette minimisation de la traînée est de retarder la transition entre l’écoulement laminaire et l’écoulement turbulent. Ainsi on pourra obtenir une couche laminaire plus grande sur toute la partie supérieure de l’aile. La figure 1 présente le modèle du profil de l’aile.
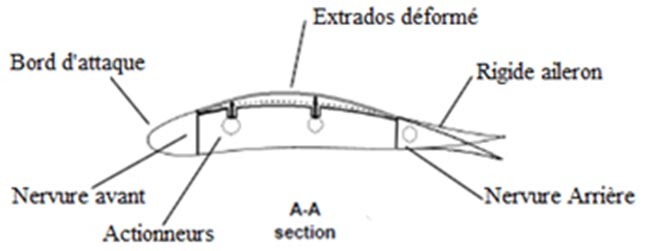
Figure 1 Modèle schématisé du profil de l’aile
Outre la présence d’un aileron au bout de l’aile, des actionneurs électriques sont utilisés afin de déformer l’extrados de l’aile. L’extrados de l’aile est fabriqué en matériaux composites. Sa structure interne a été optimisée numériquement avant sa fabrication. La figure 2 montre l’aile finalisée pour la réalisation des essais en soufflerie.
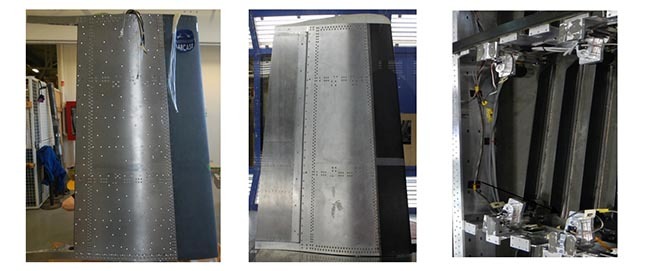
Figure 2 Modèle de l’aile fabriqué et testé en soufflerie. À droite, modèle d’aile sans aileron. Au centre, modèle d’aile avec aileron. À gauche, structure interne du démonstrateur
Les actionneurs des ailes déformables sont généralement commandés par différents systèmes fonctionnant sous divers types de logique de contrôle; plusieurs logiques de contrôle ont été testées et réalisées au LARCASE ([5]-[16]).
Méthodologie
Dans cette recherche, les positions des actionneurs électriques sont asservies pour chaque cas de vol. L’asservissement est réalisé par le développement de lois de commande robustes et rapides. La structure de la boucle de régulation est présentée à la figure 3.

Figure 3 Structure de la boucle de régulation
Cette boucle de régulation est constituée de trois sous-boucles. Sa particularité est la prise en considération du signal de l’encodeur afin de synchroniser le déplacement de l’actionneur (de la peau) avec le déplacement du signal du capteur de position (LVDT).
La boucle externe basée sur le capteur de position (LVDT) joue un double rôle :
* commande de la position de la partie déformable;
* compensation des jeux présents dans l’actionneur.
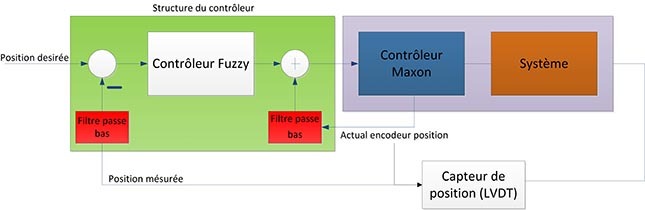
Figure 4 Structure du contrôleur basée sur LVDT
La structure de la commande de la position des actionneurs est modélisée par la technique de logique floue proportionnelle (fuzzy proportionnel), dont les fonctions d’appartenance des variables d’entrée sont présentées à la figure 5.
La variable d’entrée du contrôleur est calculée par l’erreur entre la position désirée et celle mesurée. Les filtres sont introduits afin d’éliminer les bruits apparaissant dans les signaux mesurés (LVDT et encodeur).
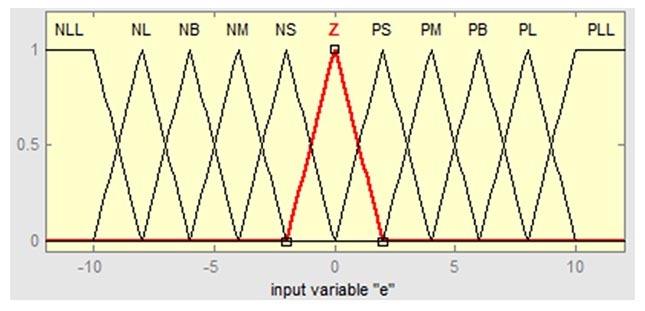
Figure 5. Fonction d’appartenance
Après avoir défini la logique de contrôle, nous l’avons implantée dans un système temps réel (unité de calcul) afin de la tester expérimentalement.
Essais effectués sur le modèle de l’aile déformable
La validation expérimentale a été réalisée tout d’abord sur le banc d’essais au LARCASE, en absence du vent. Par la suite, le démonstrateur a été testé dans la soufflerie du CNRC située à Ottawa, en présence du vent. La figure 6 montre le démonstrateur de l’aile installée dans la chambre d’essai de la soufflerie subsonique du CNRC. Les résultats de la commande obtenus en soufflerie sont présentés à la figure 7.
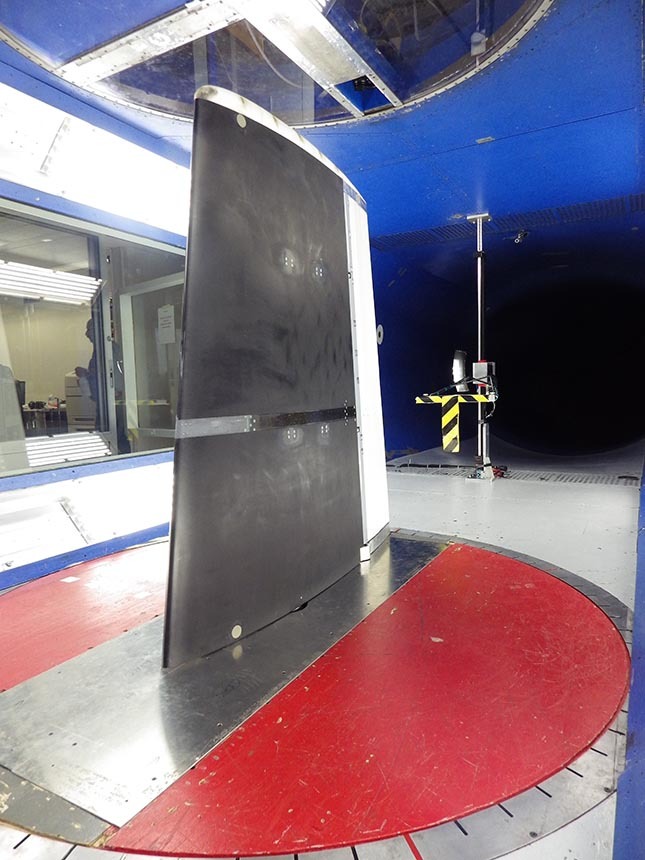
Figure 6 Démonstrateur installé dans la chambre d’essais
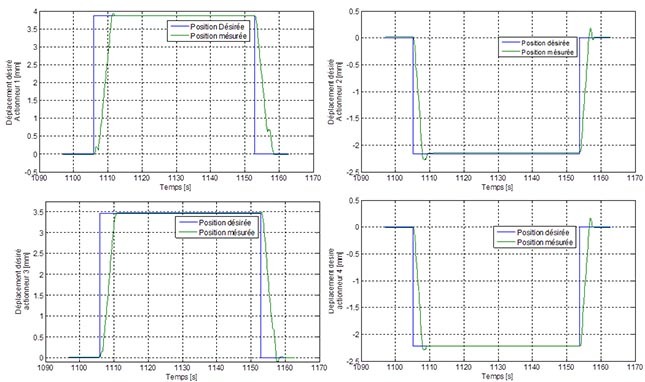
Figure 7 Déplacements des actionneurs
Le temps de réponse des actionneurs est d’environ 1,5 secondes par millimètre en présence du vent. Le dépassement est inférieur à 5 % de la valeur désirée et l’erreur statique est inférieure à 0,1 millimètre. L’erreur statique est en effet l’erreur finale entre la valeur désirée et la valeur mesurée, une fois le régime transitoire passé. L’erreur statique est donc calculée lorsque le système est complètement stable.
Finalement on peut tirer la conclusion que le contrôleur a grandi activement la région laminaire de l’écoulement.
Plus de détails sur les méthodologies utilisées pour l’optimisation aérodynamique des formes du démonstrateur, ainsi que sur son asservissement peuvent être obtenus à partir des références suivantes ([17]-[27]).
Information supplémentaire
Cette application du concept d’aile déformable s’inscrit dans le cadre du projet de recherche international MDO-505 du CRIAQ mené au sein du Laboratoire de recherche en commande active, avionique, et aéroservoelasticité (LARCASE) en collaboration avec les compagnies aéronautiques Bombardier Aéronautique et Thalès Canada. Des équipes de l’École de Polytechnique de Montréal et de l’IAR-CNRC ont aussi participé à la réalisation de ce projet ainsi que certains chercheurs italiens de l’Université Frederico II de Naples, de CIRA (Italian Aerospace Research Centre) et d’Alenia.
Pour plus d’information, consulter l’article de recherche suivant :
Tchatchueng Kammegne, M. J., Grigorie, L. T., Botez, R. M., 2015, « Design, Numerical Simulation and Experimental Testing of a Controlled Electrical Actuation System in a Real Aircraft Morphing Wing Model » The Aeronautical Journal, Vol. 119 (1219).