
Exoskeleton Robot for Rehabilitation Purposes: ETS-MARSE Robot

The header image was bought on istock.com and is protected by copyright.
Currently, robotics can be used in many fields and for many purposes, for example military or manufacturing processes—especially in dangerous environment where humans cannot intervene—the medical field, and so on. Lately, new robot systems known as “rehabilitation robots” have been introduced to improve rehabilitation treatments. The use of rehabilitation robots in the medical rehabilitation field has demonstrated great ability in improving the patient’s quality of life, enhancing practical motions, and assisting in daily exercises. This article presents an overview of the design, control and research challenges of the ETS-MARSE exoskeleton robot. Keywords: rehabilitation robots, exoskeleton robot, ETS-MARSE robot.
Pressing Needs in Physiotherapy
Without a doubt, neurological diseases are becoming a challenge for the scientific community. According to recent statistics, as many as 15 million people in the world suffer from neurological diseases like strokes, 6 million die, and 5 million live with persistent disability (4). Each year in Canada, at least 16,000 people die from a stroke (4). Survivors of a stroke typically do not have the ability to perform daily activities on their own like eating, dressing, and bathing because of the permanent disability often present on one side of the body (5). This weakness can create many physical and psychological problems related to the sufferer’s behaviour. A rehabilitation program is an effective treatment designed to help stroke victims recover functional abilities, acquire new skills and improve their quality of life (5). However, such treatments present several shortcomings, including accessibility and fatigue of therapists (6).
The Exosqueleton: A Promising Solution
Given the growing population of post-stroke victims, there is a need to improve accessibility to physiotherapy. Modern robotic technology can help in many fields, including performing medical tasks like physiotherapy. Recently, rehabilitation robotics has attracted a lot of attention from the scientific community to overcome the limitations of conventional physical therapy.6 The exoskeleton robot is an articulated mechanical structure with several degrees of freedom (DOFs) with the same anatomy as the human arm or leg. Unlike prostheses that replace a limb, the exoskeleton robot is attached to it externally and acts in parallel. This attachment allows robot wearers to move an arm in the workspace.
Video 1 Functionality of the ETS- MARSE robot. The subject is reaching different positions in 3D space.
The reachable workspace envelope depends on the number of degrees of freedom (DOFs) available with the exoskeleton robot. It can be dedicated to a specific part of the body like a hand, arm, leg, or several limbs at the same time. Equipped with sensors and actuators, it measures the user’s movements and strength and allows the physiotherapist to accurately evaluate patient performance. The importance of the rehabilitation robot lies in its ability to provide intensive physiotherapy for a long period of time (6). The measured data of the robot allows the physiotherapist to accurately assess the patient’s performance.
The Challenges
Such devices remain part of an emerging field and present many challenges. In fact, these robots have an additional complexity compared to conventional robotic manipulators due to their complex mechanical structure designed for human use, the types of assistive motion, and the sensitivity of interaction with a large diversity of human wearers. As a result, these conditions make the robot system vulnerable to dynamic uncertainties and external disturbances, such as saturation, friction forces, backlash, and payload. Likewise, the human-exoskeleton interaction makes the system subject to external disturbances due to different physiological conditions of the subjects like different upper limb weights of each patient (7, 8).
During a rehabilitation movement, the nonlinear uncertain dynamic model and external forces can turn into an unknown mathematical function that can affect the performance of the exoskeleton robot. Another problem can be raised with redundancy. Since the ETS-MARSE has 7 DOFs, a single movement can lead to a high number of inverse kinematic solutions. That is, the exoskeleton robot can reach some points of its workspace in more than one way, involving different links. Finding a solution to the inverse kinematics problem compatible with human upper limb movement and valid for human arm configuration will help to perform the human-like motion while avoiding singularity problems.
Video 2 Use of the robot in passive rehabilitation treatment
The ETS-MARSE Robot
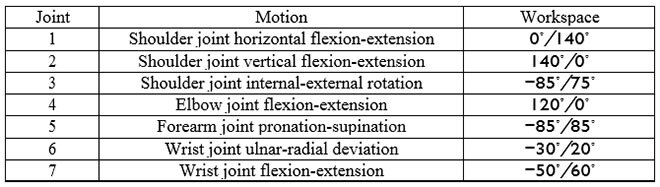
This article describes the development of an exoskeleton robot used to rehabilitate patients with upper-limb impairment, named ETS-MARSE robot (Motion Assistive Robotic-Exoskeleton for Superior Extremity). The design of the ETS-MARSE is based on the human upper limb anatomy and has been developed to faithfully represent upper limb joints and movements, in order to be worn comfortably with the robot user during rehabilitation tasks. The shoulder part has three joints: the first two joints produce the vertical and horizontal extension-flexion movements of the shoulder, while the third joint is intended to perform the internal-external rotation of the shoulder.
The elbow part is composed of one joint to complete the flexion-extension motion of the elbow. The wrist part is composed of three joints: the first is designed to perform the pronation-supination motions of the forearm, the second and third joints are dedicated to offer respectively ulnar-radial deviation, and flexion-extension motions. See Table 1.
Table 1 Workspace ETS-MARSE
The ETS-MARSE robot system has a virtual interface with which subject and therapist can follow the motions of the rehabilitation tasks. Virtual reality is a software environment created to stimulate the subject and allow him/her to perform different physical therapy exercises. This virtual interface can also provide task-oriented activities in task space, Cartesian space, and free motion, see Figure (1).

A Versatile Tool
The ETS-MARSE can provide different levels of robotic assistance strategies used after neurological accidents. The most urgent, usually in the first six weeks after an accident, is passive physical therapy (4, 6). In this type of therapy, the exoskeleton brings the patient’s limb, which is completely passive, to accomplish a therapy task. Its advantage lies in the robot’s ability to provide intensive therapy over a long period of time (9, 10). The next types of therapy, active-assisted and active modes, allow the patient to voluntarily initiate movement. During these steps, the exoskeleton wearer can perform a free motion (active mode), or an active-assisted movement where the robot corrects or guides the movement. In the latter case, the robot limits tremors or corrects trajectories. After detecting the initiation of a motion, usually voluntary, the exoskeleton will guide the performance of the activity, often using an impedance and/or admittance control (11, 12). Additionally, these strategies can be used for evaluating or studying subject movements and performance improvement. In these modes, theoretically, the patient should not feel the presence of the exoskeleton robot. Therefore, the subject is completely active and the exoskeleton robot should not affect the movement.
Video 3 Interaction of the ETS-MARSE robot with 3D virtual reality
A New Control Strategy
The aim of our research in this field is to experimentally design and validate a solution of inverse kinematics and nonlinear control strategy in order for an upper-limb exoskeleton robot to achieve different rehabilitation tasks. The idea is that improving the performance of the exoskeleton robot, and a new control system solution may be achieved by maintaining the entire nonlinear dynamics model of the robot system in its design. This strategy presents considerable challenges: first, the unavailability of nonlinear equation analytical solutions relating to robot motions; second, kinematic and dynamic models may be imperfect because of the many difficulties encountered in modeling certain phenomena including nonlinear friction, or kinematics uncertainty caused by visual devices like cameras, Kinect, etc., dynamic uncertainty or unavailability of feedback signals needed to compute the dynamic parameters of the robot system. Based on the above-mentioned problems, the main challenges in this field of robotic systems can be summarized as follows:
- High non-linearity of the robot system;
- System redundancy (many degrees of freedom, 7-DOFs for the ETS-MARSE robot);
- Unknown dynamics, or part of the robot’s dynamic model being uncertain;
- Uncertain kinematics (when a camera is used to obtain the Cartesian measurement).

Figure 2 ETS-MARSE robot
Some of these challenges have been addressed in our previous work, such as designing an inverse kinematics solution able to make the exoskeleton ETS-MARSE robot perform smooth movements mimicking natural human movement (13) (humanlike motion). To solve the approximation problem of uncertain dynamics and kinematics, we have designed controllers characterized by a high-level of robustness and accuracy without any sensitivity to uncertain nonlinear dynamics and unexpected disturbances (7, 8, 13–15). This will give the control system more flexibility to handle the uncertainties and parameter variations in different modes of rehabilitation tasks.
Conclusion
Until today, all these control approaches have been applied successfully to the ETS-MARSE robot, in tests conducted on actual healthy subjects. In the light of the satisfactory results obtained with healthy subjects, we are looking forward to implementing the proposed control strategy with actual unhealthy subjects like stroke victims in future work, which will allow us to evaluate the controller with true cases of disturbances, such as spasticity-dystonia and muscle weakness in neurological patients.
Additional Information
For more information on this research, please read the following research paper:
Brahmi, B; Saad, M.; Ochoa-Luna, O. Rahman, M.H.; Brahmi, A.. 2018. “Adaptive tracking control of an exoskeleton robot with uncertain dynamics based on estimated time-delay control,” IEEE/ASME Trans- actions on Mechatronics 23(2), 575–585.
Brahmi, B.; Saad, M.; Ocho-Luna, C.; Archambault, P.S.; Rahman, M.H. 2018. “Passive and active rehabilitation control of human upper-limb exoskeleton robot with dynamic uncertainties,” Robotica 36(11), 1757–1779.


