L'ÉTS vous donne rendez-vous à sa journée portes ouvertes qui aura lieu sur son campus à l'automne et à l'hiver : Samedi 18 novembre 2023 Samedi 17 février 2024 Le dépôt de votre demande d'admission à un programme de baccalauréat ou au cheminement universitaire en technologie sera gratuit si vous étudiez ou détenez un diplôme collégial d'un établissement québécois.
Jean-Philippe Roberge
Professeur
Department
Département de génie des systèmes
Degrees
B. Ing. (ÉTS), M. Sc. A. (Polytechnique Montréal), Ph. D. (ÉTS et Stanford)
Development of Machine Learning algorithms using synthetic visuotactile data for robotic manipulation, par Berith De La Cruz Sanchez Automne 2026
En codirection avec : François Michaud Conception d'algorithmes d'apprentissage par renforcement avec modèle pour robot multisensoriel, par Guillaume Dupoiron Automne 2026
Development, Optimization and Application of the Stereotac Sensor in Simple and Semi-advanced Robotic Tasks, par Sajjad Ahangar Automne 2026
En codirection avec : Simon Joncas Conception d'une cellule robotisée avec génération de programmes automatisés, par Camille Sauvain Hiver 2023
Mutual Capacitance Tactile Sensor Design and Sim-to-Real Bridging for Robotic Grasping, par Abed Al Rahman Al Mrad Automne 2023
Tri collaboratif de pièces semi-translucides et réflectives par intelligence artificielle, par Samuel Blanchet Hiver 2024
Téléopération d'un manipulateur robotisé par réalité virtuelle pour la maintenance et l'apprentissage de tâches, par Jonathan Boutin Hiver 2025
En codirection avec : Simon Joncas Automatisation flexible des processus de programmation hors-ligne pour la production de masse de pièces unitaires en composite thermoplastique, par Ali Chokre Été 2025
En codirection avec : François Lebel Développement d'une cellule automatisée de préparation d'ensembles prêts-à-monter multimatériaux pour la fabrication de composites en aérospatiale, par Diane Limes Automne 2023
En codirection avec : François Lebel Conception axée sur la manufacturabilité d’un préhenseur robotique robuste : Un cas d’application pour la mise en place automatisée de plis multi-matières en support à la fabrication de pièces composites complexes, par Samuel Tétrault-Leclerc Hiver 2024
Design of a Collaborative Gripper for Foam Stickers Handling, par Francis Bilodeau Automne 2023
En codirection avec : Olivier Doutres Développement d'un conduit auditif artificiel pour la mesure de pression mécanique statique générée par des bouchons à oreille, par Rihab Heni Automne 2024
En codirection avec : Christian Belleau Planification et suivi de trajectoire d'un véhicule autonome à la limite de l'enveloppe de performance sous une approche hybride par apprentissage par renforcement et commande prédictive, par Victor Dang Été 2026
En codirection avec : Étienne Gendron Génération automatique de trajectoire pour le grenaillage robotisé, par Sophie Diamond Été 2026
En codirection avec : Étienne Gendron Automatisation de l'inspection de surfaces enroulantes par vision artificielle pour la détection de défauts post traitement, par Ricardo Tovar Été 2026
Conception et exploitation d’un capteur visuotactile stéréoscopique stéréophotometrique pour la manipulation robotique en environnement contraint, par Nimai Jariwala Automne 2026
Conception d'un banc de test instrumenté pour la validation des performances essentielles de l'ORTHOPUS Supporter, par Cassandra Seive Hiver 2026
Conception d'un outil de perçage automatique de vertèbre, par Ronn Touitou Été 2026
En codirection avec : Nicholas Nadeau Enhancing Robot Localization with Semantic Features: Creation of a Semantic Map for Autonomous Navigation Tasks, par Huynh-Anh Le Hiver 2023
En codirection avec : Marco Pedersoli "Few-Shot Object Detection" et application "Pick and Place" dans le cadre d'un projet avec l'entreprise Teledyne Dalsa, par Antoine Bailly Été 2023
En codirection avec : Mahdi Khoramshahi Pilotage d'un exosquelette pour membres supérieurs avec un casque EEG, par Hamsa Mousa Été 2025
En codirection avec : Rim Larbi Algorithme d’évitements de collisions pour des robots Scara dans le cadre d’un projet avec l’entreprise Radiall, par Adam Alibert Automne 2025
Création d'une carte sémantique par caméra stéréoscopique qui sera utilisée pour faire de la navigation autonome, par Huynh-Anh Le Hiver 2023
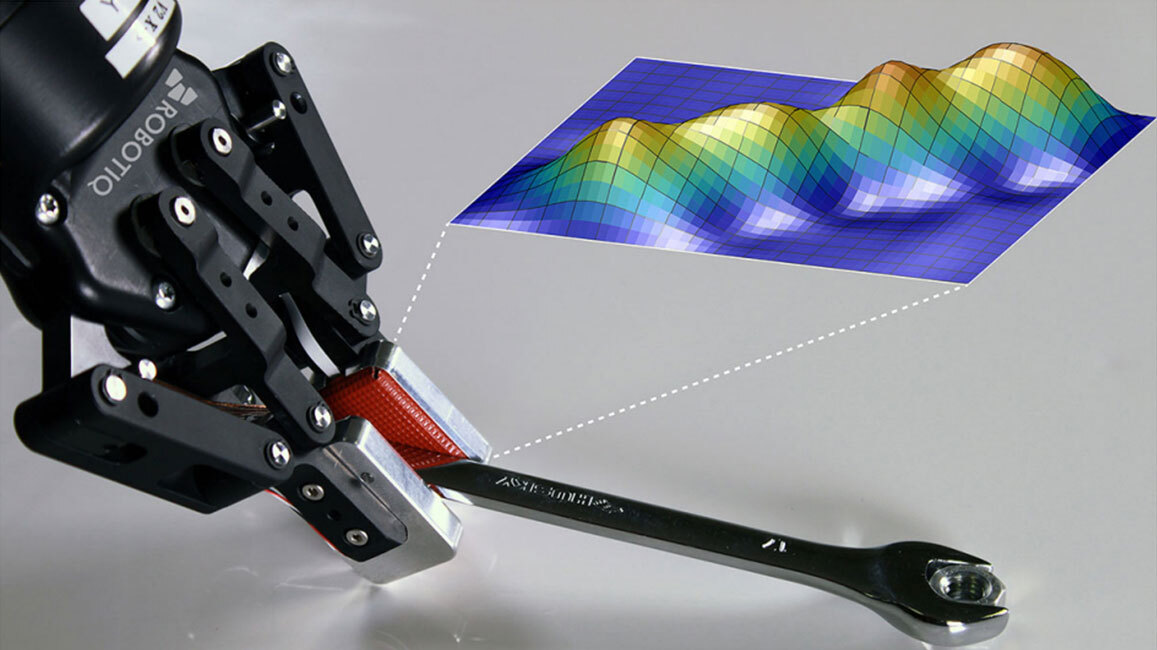
Jean-Philippe Roberge, Louis L'Écuyer-Lapierre, Jennifer Kwiatkowski, Philippe Nadeau, Vincent Duchaine. 2021 « Tactile-based object recognition using a grasp-centric exploration ». Communication lors de la conférence : IEEE 17th International Conference on Automation Science and Engineering (CASE) (Lyon, France, Aug. 23-27, 2021)
Berith Atemoztli De La Cruz Sanchez, Jennifer Kwiatkowski, Jean-Philippe Roberge. 2025 « Tactile contact patterns for robotic grasping: A dataset of real and simulated data ». 3rd International Conference on Control and Robot Technology (ICCRT) (Singapore, Singapore, Apr. 16-18, 2025) Institute of Electrical and Electronics Engineers Inc.
Jean-Philippe Roberge, Louis L'Ecuyer-Lapierre, Jennifer Kwiatkowski, Philippe Nadeau, Vincent Duchaine. 2021 « Tactile-based object recognition using a grasp-centric exploration ». IEEE 17th International Conference on Automation Science and Engineering (CASE) (Lyon, France, Aug. 23-27, 2021) IEEE Computer Society
Jennifer Kwiatkowski, Jean-Philippe Roberge, Nicholas A. Nadeau, Louis L'Écuyer-Lapierre, Vincent Duchaine. 2018 « An extrinsic dexterity approach to the IROS 2018 fan robotic challenge ». 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Madrid, Spain, Oct. 1-5, 2018) IEEE
Thuy-Hong-Loan Le, Alexis Maslyczyk, Jean-Philippe Roberge, Vincent Duchaine. 2017 « A highly sensitive multimodal capacitive tactile sensor ». 2017 IEEE International Conference on Robotics and Automation (ICRA) (Singapore, Singapore, May 29- June 03, 2017) IEEE