
September 23, 2016

Editor’s note
Jeremy Brossard is the École de technologie supérieure (ETS) internal winner of “My thesis in 180 seconds”. He represented the institution at the national final competition, which took place at the Université du Québec in Montreal during the 84th ACFAS Congress, on May 11, 2016. His excellent presentation can be seen in the following video (in French language):
Introduction
The use of quadcopter drones, in various civil and military applications, has shown a clear improvement in their performance in recent years. Easy to handle, fast, inexpensive, capable of lifting heavy loads, mechanically simple and compact, this relatively new technology is found in many applications: rescue, transportation, entertainment, inspection…
Description of quadcopters and their issues
A quadcopter is a multirotor helicopter equipped with four arms, each with a motor and a propeller at the end. Its orientation in space is along the linear axes x, y, z and the angular rotations roll (ɸ), pitch (θ) and yaw (ψ) (Figure 1).
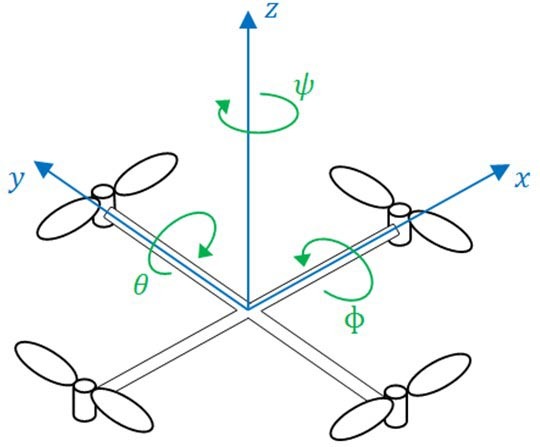
Figure 1 Linear and Angular Coordinates of a Quadcopter
When applied to the quadcopter, control signals, denoted U in figure 2, command the rotational speeds of the four motors and produce the quadcopter’s displacement in space. Ideally, the control input which is the difference between the set point Yc and the measured positionYm, denoted ε in figure 2, is nil. In an ideal world, Ym = Yc.
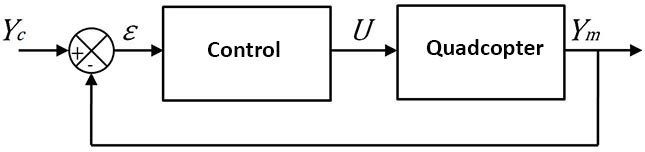
Figure 2 Quadcopter Simplified Control Loop
There are numerous problems encountered in classical control algorithms: difficulty maintaining rapid and correct input flow without the secondary temporal effects (overshoot, oscillation, tracking of the input…). In addition, the quadcopter is a multivariable system with couplings between inputs and outputs. This means a command on input n will cause output n to react, but will also impact the other outputs. Thus, a command increasing altitude does not translate into an exclusive rise in altitude: the roll angle (ɸ), pitch (θ) and yaw (ψ) are also affected to a lesser extent.
In addition to these problems, there are those caused by external disturbances such as wind or rain, as well as a limited battery charge which lasts on average between 5 min and 60 min.
The B Control
The B control is a new control method with impressive results in terms of speed and accuracy of the controlled variables. This control was the subject of a patent (Bensoussan, 2014), of a publication in Automatica (Bensoussan, 2015a), as well as an experimental validation on a magnetic levitation system in the McGill University laboratories (Bensoussan, 2015b), the results can be seen in the following video.
A Substance ETS article titled An Algorithm to Increase the Speed of Feedback Systems of Professor Bensoussan, explains its principles.
The objective of the research is to extend these results to multi-variable systems. The quadcopter-type drones appear as excellent choices for B control feasibility testing on more complex systems. The B control aims at reducing the effects of coupling and to ensure that the quadcopter react only in the direction assigned to it by the set point signal. Faster more accurate and more robust drone positioning is expected including a reduction in energy consumption.
The B control extension to quadcopters will first be validated by simulation. The next step will be the implementation in a real system. To this end, ARA Robotics, a company specializing in the development of a flight controller incubated at Centech, will supply a quadcopter ARA-403-B mock-up and the required environment to undertake the experimental validation.
Anticipated Benefits and Industrial Impact
Ideal for accessing hard to reach areas to transport medical supplies, to help people or animals in danger, drones are also used for inspection to verify the condition of infrastructure such as dams, power lines or agricultural areas for improving yields. In addition, they are used for surveillance purposes.
The entertainment business also benefits from the usage of drones. In cinematography, for example: since they are more accurate, lighter, smaller and inexpensive, they now replace camera cranes during film shoots.
All these applications have great potential. However, they still suffer weaknesses in terms of quadcopter control: the lack of precise positioning, lack of robustness against external disturbances, inability to move along one axis at a time and low battery life. B Control aspires to overcome these shortcomings.
The application of the B Control extends well beyond the field of drones. Many domains such as: aeronautics, environmental, electric transportation, robotics, medicine, and so on, could benefit from its application. For instance, the treatment of some cancerous tumors requires devices with better precision to perform remote surgery sparing healthy tissues. With the application of B Control, these surgical interventions could be 10 to 100 times more precise and would enable performing these delicate operations in sensitive areas such as those close to a nerve. The development of the B Control holds a very high potential and promises substantial economic spinoffs.


