
23 septembre 2016

Note de l’éditeur
Jérémy Brossard est le gagnant du concours interne de l’École de technologie supérieure de Montréal (ÉTS) « Ma thèse en 180 s ». Il a représenté l’établissement lors de la finale nationale du concours qui se déroulait à l’Université du Québec à Montréal lors du 84e Congrès de l’Acfas, le 11 mai 2016. Son excellente prestation peut être vue dans la vidéo suivante :
Introduction
L’utilisation des drones de types quadricoptères, dans des domaines variés relevant du civil et du militaire, s’est accompagné d’une nette amélioration de leurs performances ces dernières années. Maniable, rapide, peu coûteuse, capable de soulever de lourdes charges, simple mécaniquement et peu encombrante, cette technologie relativement récente se retrouve dans un grand nombre d’applications : sauvetage, transport, divertissement, inspection …
Présentation des quadricoptères et de leur problématique
Un quadricoptère est un hélicoptère multirotor munit de quatre bras, chacun d’eux pourvu d’un moteur et d’une hélice à son extrémité. Son positionnement dans l’espace est réalisé suivant les positions linéaires x, y, z et angulaires phi, thêta et psi (figure 1).
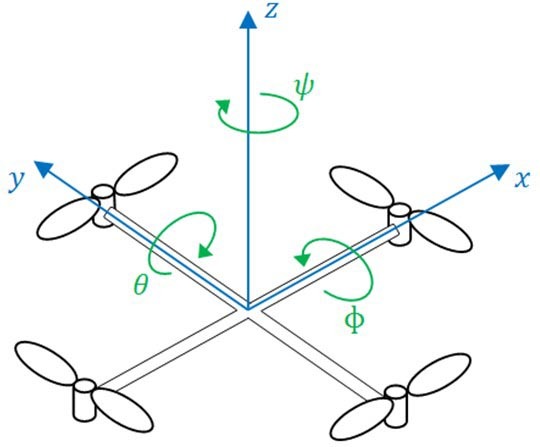
Figure 1 Coordonnées linéaires et angulaires d’un quadricoptère
Des signaux de commandes appliqués au quadricoptère, dénotés U sur la Figure 2, commandent les vitesses de rotation des quatre moteurs et génèrent son déplacement dans l’espace. Idéalement, l’entrée de la commande qui est la différence entre la consigne Yc et la position mesurée Ym, notée ε sur le schéma, est nulle. Idéalement Ym=Yc.
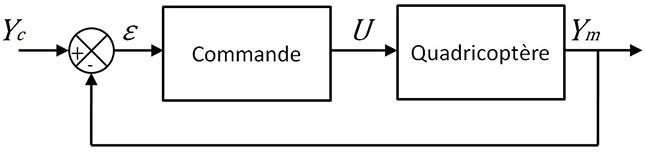
Figure 2 Boucle de commande simplifiée d’un quadricoptère
Les problèmes rencontrés par les algorithmes de commande classiques sont multiples : difficulté à maintenir une poursuite rapide et fidèle de l’entrée sans les effets temporels secondaires (dépassement, oscillation, erreur finale entre la consigne et la mesure…). De plus, le quadricoptère est un système multivariable avec des couplages entre les entrées et les sorties. C’est-à-dire qu’une commande sur l’entrée n va faire réagir la sortie n, mais va également influencer les autres sorties. Ainsi, à une commande d’élévation de l’altitude ne correspond pas une élévation exclusive de l’altitude : les angles de roulis (ɸ), de tangage (θ) et de lacet (ψ) sont également affectés dans une moindre mesure.
À ces problèmes s’ajoutent ceux d’une sensibilité aux perturbations extérieures telles que le vent ou la pluie ainsi qu’une autonomie des batteries limitée puisqu’elles durent en moyenne entre 5 min et 60 min.
La commande B
La commande B est une nouvelle méthode de commande qui obtient des résultats impressionnants sur le plan de la vitesse et de la précision des variables contrôlées. Cette commande a fait l’objet d’un brevet (Bensoussan, 2014), d’une publication dans Automatica (Bensoussan, 2015a) ainsi qu’une validation expérimentale sur un système de lévitation magnétique dans les laboratoires de l’université McGill (Bensoussan, 2015b), dont les résultats sont visibles dans la vidéo ci-dessous.
Un article de Substance ÉTS intitulé Un algorithme pour accroître la vitesse des systèmes asservis présente également la recherche du professeur Bensoussan et en explique les principes.
L’objectif de la recherche consiste à étendre ces résultats aux systèmes multivariables. Les drones de type quadricoptères apparaissent alors comme d’excellents candidats pour tester la faisabilité de la commande B sur des systèmes plus complexes. La commande B vise à réduire les effets de couplage et faire en sorte que le quadricoptère réagisse seulement dans la direction qui lui est assignée par le signal de consigne. Un positionnement plus rapide, plus précis et plus robuste du drone est attendu ainsi qu’une diminution de la consommation d’énergie.
L’extension de la commande B au quadricoptère sera tout d’abord validée par simulation. L’étape suivante sera de l’implanter sur un système réel. Pour ce faire, ARA Robotique, une entreprise spécialisée dans le développement de contrôleur de vol incubée au Centech, va fournir une maquette de quadricoptère ARA-403-B et l’environnement nécessaire pour réaliser les validations expérimentales.
Retombées prévues et impact industriel
Idéaux pour atteindre des zones difficiles d’accès pour y transporter du matériel médical, secourir des personnes ou des animaux en danger, les drones sont également utilisés dans le secteur de l’inspection, pour vérifier l’état d’infrastructures telles que les barrages , les lignes électriques ou les zones de plantation pour en améliorer le rendement. Ils sont aussi utilisés à des fins de surveillance.
Le domaine du divertissement bénéficie également des performances des drones. Par exemple, en cinématographie : plus précis, plus légers, moins encombrants et moins onéreux, ils remplacement désormais les grues pour faire les prises de vue.
Toutes ces applications possèdent un grand potentiel. Mais elles souffrent encore des faiblesses que rencontre la commande des quadricoptères : le manque de précision dans le positionnement, le manque de robustesse face aux perturbations extérieures, l’impossibilité de se déplacer sur un seul axe à la fois et la faible autonomie des batteries. La commande B vise à pallier ces manquements.
L’application de la commande B s’étend bien au-delà du domaine des drones. De nombreux secteurs pourraient bénéficier des performances de la commande B tels que : l’aéronautique, l’environnement, le transport électrique, la robotique, la médecine … Par exemple, le traitement de certaines tumeurs cancéreuses nécessite une meilleure précision des appareils effectuant la chirurgie télécommandée pour ne pas toucher les tissus sains. Avec l’application de la commande B ces interventions pourraient être de 10 à 100 fois plus précises, permettant alors d’effectuer ces opérations délicates dans des régions sensibles comme celles à proximité d’un nerf. Le développement de la commande B possède un très haut potentiel et promet de fortes retombées économiques.


