
Technologie de drones de nouvelle génération appliquée à l’UAS-S45

Achetée sur Gettyimages. Droits d’auteur.
Ces dernières années, de nombreux chercheurs de l’industrie aéronautique se sont penchés sur le concept d’aile déformable en raison de ses avantages prometteurs en matière d’aérodynamique et de dynamique de vol. Cette technologie profite à l’industrie, pour ce qui est des politiques économiques de réduction des coûts et elle contribue aux objectifs des technologies vertes visant la réduction des émissions de carbone. Dans cette étude, nous avons réalisé l’optimisation aérodynamique du bord de fuite déformable d’un système aérien de surveillance sans pilote (drone), l’UAS-S45, afin d’analyser la corrélation entre l’optimisation et la méthode de paramétrisation. Nous avons appliqué la méthode de paramétrisation à déformation libre (Free Form Deformation, FFD) pour connaître l’influence des conditions initiales de paramétrisation sur les résultats de l’optimisation. Ces résultats indiquent que le nombre de points de contrôle affecte sensiblement le processus d’optimisation, en particulier la convergence, la fonction objective et la faisabilité de la déformation. Mots clés : Paramétrage de déformation, UAS-S45, volet déformable, paramétrage FFD, cadre d’optimisation DAFoam, OpenFOAM.
Technologie inspirée de la nature pour les avions de nouvelle génération
On trouve souvent dans la nature les meilleures solutions aux problèmes modernes. Notre environnement physique a évolué pendant des millions d’années et nous voyons aujourd’hui une version optimisée de sa fonctionnalité; il est sage d’appliquer ces solutions hautement efficaces à nos problèmes d’ingénierie actuels. Par exemple, les oiseaux ont su optimiser leur méthode de vol au cours de millions d’années. Imiter ces oiseaux et appliquer leur mécanisme de vol aux avions fabriqués par des humains nous permettrait de résoudre les problèmes de l’industrie aéronautique. Nous aurions alors des aéronefs des plus efficaces, dont l’aérodynamique surpasserait la dynamique traditionnelle en réduisant la traînée et, plus encore, la consommation de carburant, minimisant ainsi les émissions de carbone et rendant les aéronefs plus respectueux de l’environnement.
L’aile déformable est l’une des technologies prometteuses qui nous permettra d’atteindre ces objectifs, créant des avions très efficaces pour cette industrie de nouvelle génération. La technologie des surfaces déformables est étudiée pour chaque condition de vol, comme le décollage, la montée, le vol de croisière, les manœuvres de roulis et l’atterrissage. Pour chaque condition de vol, différentes stratégies de surfaces déformables ont été proposées : le balayage [1], la torsion [2], l’ailette [3], la travée [4], la cambrure [5], le bord d’attaque [6,7] et la surface supérieure [8-16]. Ces dernières années, le laboratoire de recherche sur les commandes actives, l’avionique et l’aéroservoélasticité (LARCASE) a réalisé plusieurs optimisations aérodynamiques au moyen d’algorithmes d’optimisation et de méthodes de paramétrage. Le tableau 1 présente ces études en détail.
Tableau 1 Liste des travaux de recherche du LARCASE utilisant différents algorithmes d’optimisation et méthodes de paramétrage
L’optimisation de l’aérodynamique fait l’objet de nombreuses études en raison de l’amélioration notable de performance des avions et drones qui s’ensuit. Le choix d’une méthode adéquate de paramétrage pour modifier la forme de l’aile doit se faire avant de commencer tout processus d’optimisation : plus la forme de l’aile est paramétrable, plus les résultats de l’optimisation seront précis et robustes. Le processus global d’optimisation (temps de calcul, robustesse et précision de la solution) dépend fortement de la technique de paramétrisation choisie [1].
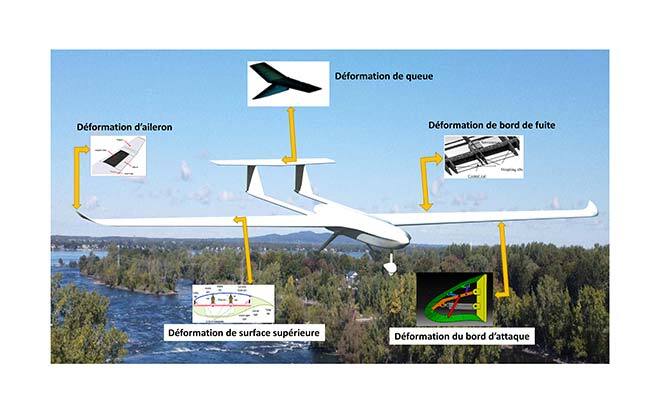
Cette étude a donc porté sur l’optimisation de la forme aérodynamique du bord de fuite déformable. Parmi les configurations déformables, le bord de fuite est le plus couramment étudié, en raison de son effet sur les performances de vol, surtout en vol de croisière. Ainsi, nous avons optimisé le bord de fuite déformable de la voilure de l’UAS-S45 à l’aide de la technique de paramétrage FFD. L’UAS-S45 est un système aérien de surveillance sans pilote conçu et fabriqué par Hydra Technologies au Mexique. La figure 1 montre l’UAS-S45 sous différentes configurations déformables résultant des études menées au LARCASE.
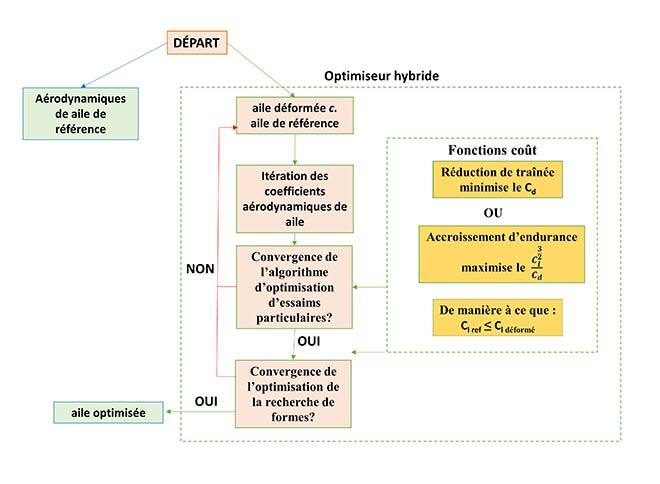
Figure 1. Études de déformations et optimisations sur l’UAS-S45 au LARCASE.
Aperçu de la stratégie d’optimisation
Ici, notre méthode avait pour but de trouver la forme optimale du bord de fuite déformable de la voilure UAS-S45 en conditions de vol de croisière. Pour réaliser cette optimisation, nous avons généré ou paramétré la voilure et l’importer de l’espace physique à l’espace de modélisation en tenant compte des formulations mathématiques. Nous avons donc appliqué la technique FFD, l’objectif principal de cette étude étant d’analyser l’influence de la méthode de paramétrage sur les résultats de l’optimisation. L’optimisation était fondée sur un algorithme de gradient qui associait un nouvel algorithme d’optimisation Python à un solveur de fluides haute-fidélité OpenFOAM. Le cadre d’optimisation global est illustré à la figure 2.
Figure 2. Cadre d’optimisation.
Technique de paramétrisation FFD
Dans cette technique de mappage, la géométrie de l’aile d’une taille donnée est intégrée dans un maillage, appelé bloc FFD, avec ses points de contrôle correspondants. Le réseau est constitué de points de contrôle B-spline qui, lorsque modifiés, changent la forme du fuselage intégré.
Le nombre de points de contrôle et leurs déplacements dépendent de la géométrie et de la zone de déformation du fuselage. Pour analyser la paramétrisation FFD selon le nombre de points de contrôle, nous avons analysé cinq ensembles de blocs FFD comportant différents nombres de points de contrôle pour leur même topologie et la même configuration déformable. La figure 3 montre la géométrie de la voilure de l’UAS-S45 intégrée dans le bloc FFD. Nous avons deux blocs FFD, l’un pour la partie non déformée (bloc blanc : 70 % de la longueur de la corde) et l’autre pour le bord de fuite déformable (bloc rouge : 30 % de la longueur de la corde). Selon la figure 3, les points de contrôle en vert peuvent se déplacer verticalement vers le bas pour augmenter le rapport portance-traînée, et les autres (non colorés) sont contraints à un mouvement nul dans toutes les directions.
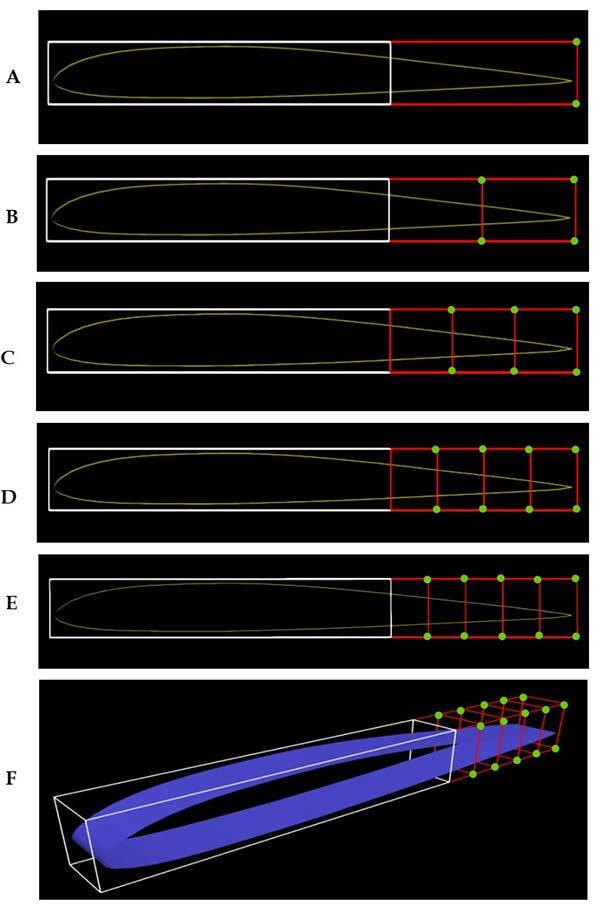
Figure 3. Cinq cas de voilure UAS-S45 intégrée en blocs FFD avec A) 8, B) 12, C) 16, D) 20, E) 24 points de contrôle en vue latérale, et F) le bloc FFD avec 24 points de contrôle en vue isométrique.
Résultats
Nous avons comparé les résultats de l’optimisation pour cinq cas ayant un nombre différent de points de contrôle. Nous avons comparé certains résultats (temps de convergence, nombre d’itérations, erreurs d’optimalité et valeurs de la fonction objective) selon différents nombres de points de contrôle.
La figure 4 (A-B) montre l’erreur d’optimalité du processus d’optimisation pour chacun des cas. À la figure 4-A, cas 1 à 3, le nombre de points de contrôle est inférieur à celui des cas 4 et 5, et la convergence est atteinte avec un faible nombre d’itérations et une erreur de l’ordre de 10^-6 . Or, comme le montre le tableau 3, dans les cas 4 et 5 (figure 4-B), une bonne convergence n’est pas atteinte même après 50 itérations et l’erreur est de l’ordre de 10^-2 et de 10^-3 pour les cas 4 et 5, respectivement. Le tableau 3 montre une comparaison entre cinq cas selon la convergence, le nombre d’itérations, l’optimalité et le rapport portance-traînée (Cl/Cd).
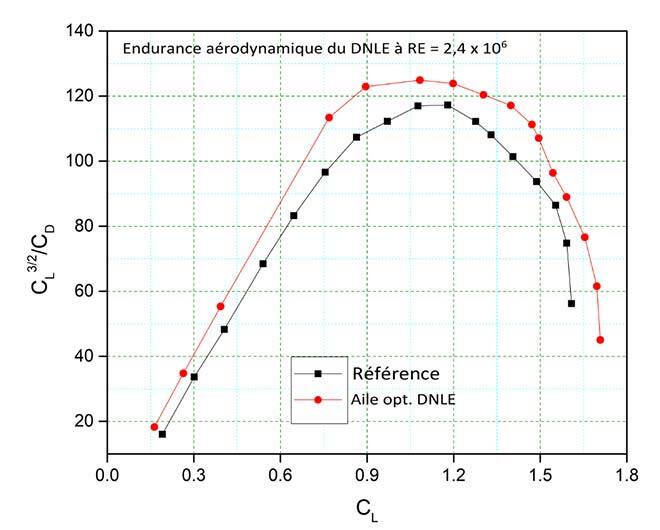
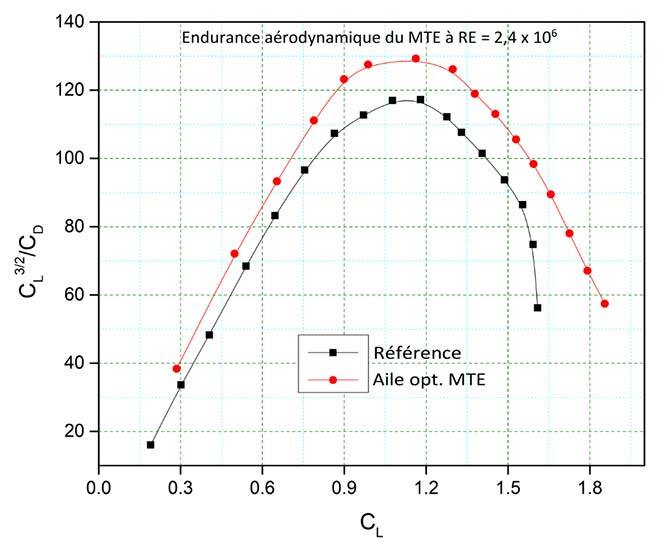
Figure 4. Erreurs dans le processus d’optimisation, A) Cas 1, 2 et 3, B) Cas 4 et 5.
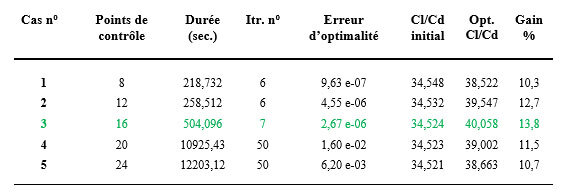
Tableau 3 Comparaison des résultats d’optimisation obtenus pour les cinq cas
Comme le montre le tableau 3, plus le nombre de points de contrôle augmente, plus les itérations, le temps de calcul et l’erreur augmentent, ce qui donne des résultats imprécis. Si l’on considère la fonction objective, la valeur maximale du rapport portance-traînée est obtenue dans le cas 3, soit un gain de 13,8 %. Si tous les critères sont pris en compte, on observe que le cas 3 à 16 points de contrôle donne les meilleurs résultats quant à l’erreur d’optimalité, au temps de convergence et à la maximisation de Cl/Cd (fonction objective).
La figure 5 montre la voilure de l’UAS-S45 après l’optimisation (la déformation) du bord de fuite déformable dans les cinq cas. Dans le cas 1, celui avec le plus petit nombre de points de contrôle (8), le bord de fuite présente une forte courbure, comme celle d’un volet articulé, mais au fur et à mesure que le nombre de points de contrôle augmente, la déformation s’estompe. Par contre, lorsque le nombre de points de contrôle dépasse 16 (cas 4 et 5), la déformation adoucie du bord de fuite devient onduleuse (figure 5). Par conséquent, le cas 3 est le meilleur quant à la faisabilité de la déformation.
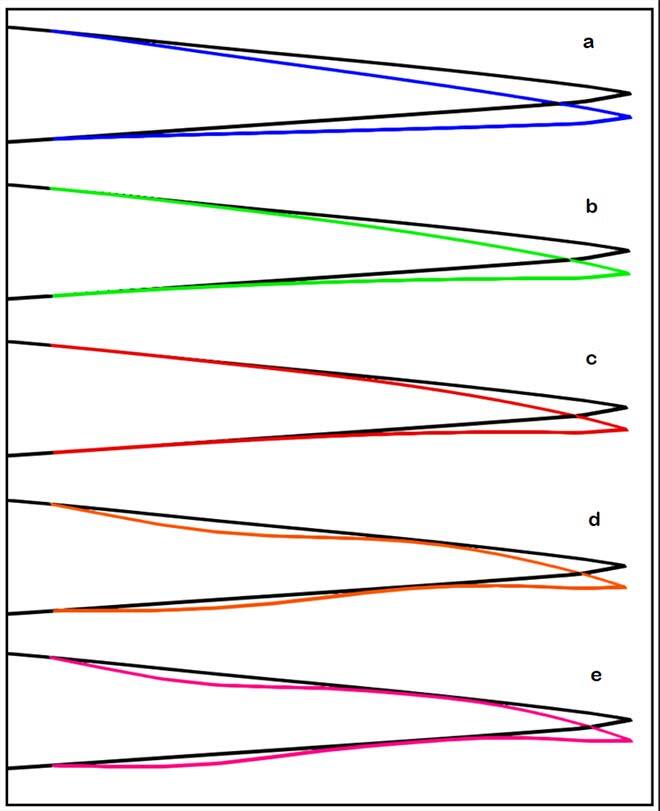
Figure 5. Déformation du bord de fuite de la voilure UAS-S45 pour les a) cas 1, b) cas 2, c) cas 3, d) cas 4, et e) cas 5, après l’optimisation.
Conclusion
Nous avons réalisé l’optimisation aérodynamique haute-fidélité d’un bord de fuite déformable à l’aide de la technique de paramétrisation à déformation libre (FFD). Cinq cas ont été étudiés, comportant différents nombres de points de contrôle. L’objectif principal était de montrer la flexibilité de la paramétrisation FFD selon les points de contrôle et son effet sur les résultats finaux de l’optimisation. L’étude des cinq cas a démontré que les résultats d’optimisation sont directement reliés aux choix du nombre de points de contrôle, car un nombre trop faible de points de contrôle (moins de 16) entraînerait une déformation irrégulière et peu d’amélioration de la fonction objective. Cette observation signifie qu’un faible nombre de points de contrôle limite la capacité de déformation. D’autre part, appliquer un nombre plus élevé de points de contrôle (plus de 16) donne des déformations ondulées indésirables, peu pratiques du point de vue du mécanisme et de la fabrication, une précision d’optimisation limitée et une convergence insatisfaisante. Nous avons démontré que l’effet du nombre de points de contrôle sur les résultats de l’optimisation est substantiel et direct. Il convient maintenant de trouver un compromis pour déterminer le nombre optimal de points de contrôle avant de commencer l’optimisation en fonction de trois paramètres : temps de calcul, optimalité de la solution et taux d’amélioration de la fonction objective.
Complément d’information
Pour plus d’informations sur cette recherche, veuillez lire l’article suivant :
Negahban, M.H., Bashir M., Botez, R.M., “Free-Form Deformation Parametrization on the Aerodynamic Optimization of Morphing Trailing Edge,” Journal of Applied Mechanics, 4(1), 2023, pp. 304-316.


