
Des robots dotés du sens du toucher

L’image d’en-tête a été achetée sur Istock.com. Des droits d’auteur s’appliquent.
Note de l’éditeur
Cet article est tiré d’une présentation devant public faite par le professeur Vincent Duchaine de l’École te technologie supérieure (ÉTS) de Montréal dans le cadre de l’émission La Sphère du 1er octobre 2017, animée par Mathieu Dugal à la chaîne de Radio-Canada.
——————————–
Les robots sont traditionnellement faits de métal et sont très forts. Même lorsque leur force est paramétrée à la limite inférieure, ils sont incapables de saisir un objet fragile, comme une coquille d’œuf vide ou un verre à café en styromousse, sans l’écraser parce qu’ils ne sentent pas les objets. Mon équipe de chercheurs travaille à munir ces robots d’une peau artificielle qui permet de mesurer la pression exercée en tout point de contact. Cette peau de silicone n’est pas composée de capteurs discrets; elle s’apparente davantage à un écran tactile, à la différence qu’elle est flexible et extensible.
Évaluer la prise d’un robot au moyen d’une image de pression
Les robots utilisés en milieu manufacturier sont appelés à prendre des objets de formes et de textures différentes. Comment peut-on enseigner à un robot à évaluer sa prise sur un objet? Comment peut-il savoir s’il a réussi à agripper solidement un objet ou au contraire, si l’objet est en train de lui échapper?

Figure 1 Objets ayant été utilisés pour les tests
Nous avons fait venir une centaine d’objets variés d’Amazon. Un étudiant a fait prendre chacun de ces objets environ 1000 fois par un robot. À chaque essai, une image de pression représentant la prise du robot était générée (voir figure suivante) et l’étudiant notait si la prise était stable ou non. Ces images de même que le constat noté par l’étudiant forment un dictionnaire que le robot peut consulter rapidement afin de juger de la stabilité de sa prise. On nomme cette méthode la programmation éparse (sparse coding).
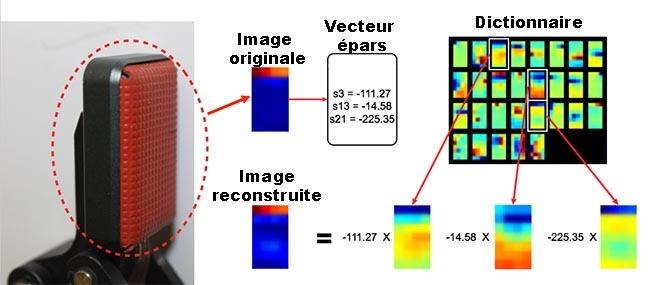
Figure 2 Méthode de la programmation éparse
Le taux de succès obtenu par cette méthode est de 93 %, soit l’un des meilleurs atteints jusqu’à maintenant. Toutefois, il reste encore beaucoup de travail à faire pour intégrer ce système en usine où il est nécessaire de s’approcher de 100 %. L’une de raisons qui explique que nous n’arrivons pas à 100 % est que le sens du toucher n’est pas suffisant pour déterminer si une prise est stable ou non. D’ailleurs, les êtres humains utilisent aussi leur vision pour y parvenir.
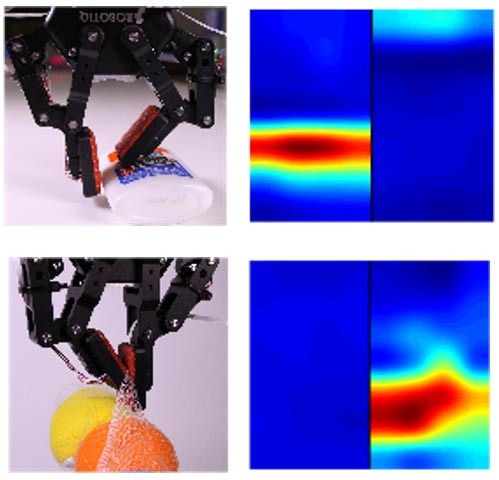
Figure 3 Exemples où la vue est nécessaire pour bien évaluer la prise
Déterminer si un objet glisse au moyen du son
Une autre question à laquelle l’équipe de recherche a tenté de répondre est la suivante : l’objet que le robot a agrippé, est-il en train de glisser? Pour y parvenir, nous nous sommes servi de capteurs de vibrations, c’est-à-dire d’instruments capables de détecter le son. Les vibrations détectées peuvent venir de trois sources :
- du glissement de l’objet pris par le robot contre sa main (figure 4, image C1);
- du glissement de l’objet agrippé contre une autre surface (figure 4, image C2);
- des mouvements du robot (figure 4, image C4).
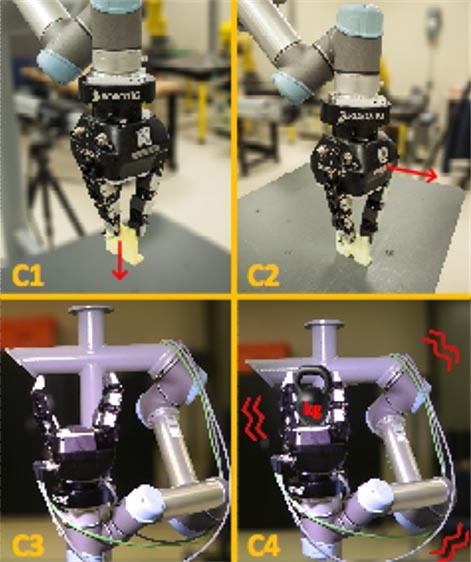
Figure 4 Source des vibrations pouvant être détectées
La grande difficulté qu’il faut résoudre est de discriminer les différents types de vibrations afin d’isoler les cas où l’objet glisse contre la main du robot. La méthode de la programmation éparse a aussi été utilisée sauf que cette fois, le dictionnaire était composé de sons, un peu comme le système Siri d’Apple.
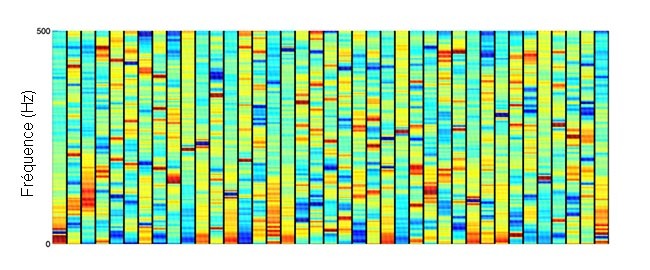
Figure 5 Dictionnaire de vibrations
Les cas de vibrations causés par les mouvements du robot ainsi que les cas où aucune vibration n’est perceptible ont tous été bien catalogués. Les cas où l’objet glissait de la main du robot ont été reconnus à 84 %.
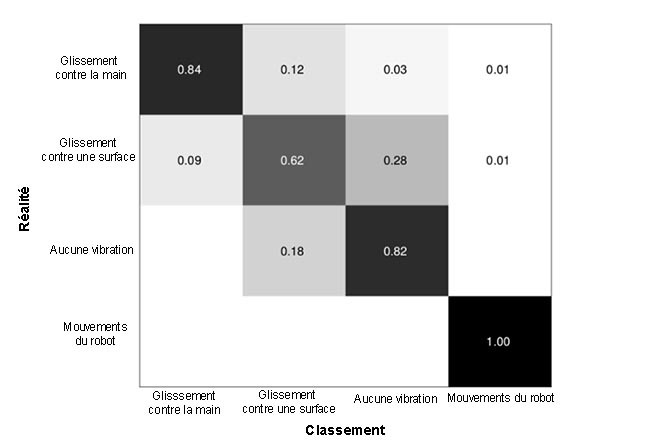
Figure 6 Résultats du classement des vibrations
Ce résultat est très encourageant, mais là encore, beaucoup de travail reste à faire pour une implantation en usine.


