
L'avion plus électrique ou l’avenir de l’industrie aéronautique

L’image d’en-tête a été achetée sur Istock.com. Des droits d’auteurs s’appliquent.
Depuis la dernière décennie, le secteur aérospatial s’est fixé comme objectif de développer des avions qui intègrent de plus en plus de systèmes électriques permettant d’augmenter graduellement la proportion d’énergie électrique utilisée. Essentiellement motivée par la volonté d’accroître l’économie de carburant et de réduire l’empreinte environnementale des vols, la tendance des avions modernes à utiliser davantage l’énergie électrique a donné naissance à plusieurs projets de recherche axés sur la création de nouvelles architectures innovantes de propulsion et de systèmes électriques. La recherche a pour but de développer une plate-forme de simulation pour système de distribution d’énergie électrique. Le développement de modèles numériques et d’outils de simulation vise à concevoir des systèmes électriques plus efficaces. Les outils de simulation offrent des solutions pour augmenter la robustesse du système tout en réduisant les tests en vol coûteux. Ils rendent également possible l’étude d’un grand nombre de scénarios opérationnels et la détection des conditions entraînant des défaillances.
Introduction
Depuis la dernière décennie, le secteur aérospatial travaille à la conception d’avions plus électriques permettant d’augmenter graduellement la proportion d’énergie électrique utilisée. Essentiellement motivée par la volonté d’accroître l’économie de carburant et de réduire l’empreinte environnementale des vols, la tendance des avions modernes à se reposer davantage sur l’énergie électrique a donné naissance à plusieurs projets de recherche axés sur la création de nouvelles architectures innovantes de propulsion et de systèmes électriques.
Pour les constructeurs aéronautiques, le concept « plus électrique » est une nouvelle cible technologique qui consiste à réduire la consommation de carburant, à améliorer l’efficacité énergétique et à réduire considérablement le poids des avions. Dans les avions classiques, les systèmes multiples reposent sur des sources d’énergie hydraulique, mécanique, pneumatique et électrique. Ces types d’énergie présentent différents inconvénients quant à l’efficacité, aux émissions, à la fiabilité et aux coûts d’entretien, en particulier pour ce qui est des systèmes hydrauliques et pneumatiques. L’objectif de l’avion plus électrique est de remplacer les systèmes pneumatiques et mécaniques par des systèmes électriques afin d’en réduire le poids et la taille, et d’améliorer le rendement énergétique. Il devient donc nécessaire d’augmenter l’efficacité des systèmes et composants électriques des avions pour générer, distribuer et utiliser l’énergie électrique.
Architectures de propulsion électrique
La propulsion électrique pourrait réduire les émissions de carbone, mais seulement si les nouvelles technologies répondent à des critères précis de puissance, de poids et de fiabilité. Six types d’architecture de propulsion électrique sont envisagés [1]. Comme le montrent les figures suivantes, l’un est tout électrique, trois sont hybrides électriques et deux sont turboélectriques [2].
- Tout électrique
- Hybride électrique
- Hybride parallèle
- Hybride en série
- Hybride partiel en série/parallèle
- Turboélectrique
- Tout turboélectrique
- Turboélectrique partiel
Ces six architectures sont fondées sur différentes technologies électriques : batteries, moteurs, générateurs et convertisseurs. Les batteries, au lieu de l’essence, sont la seule source de propulsion dans les systèmes tout électriques; les moteurs à turbine dans les systèmes hybrides servent à la propulsion et au chargement les batteries (figure 1). Toutefois, les batteries fournissent de l’énergie de propulsion pendant certaines phases de vol.
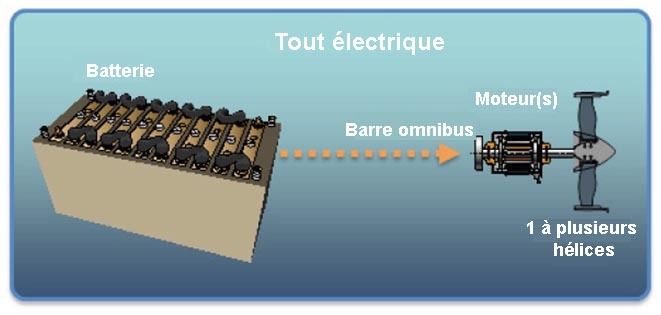
Figure 1 Architecture tout électrique
Dans une topologie hybride parallèle (figure 2), une batterie fournit de l’énergie au générateur électrique et un turbomoteur (turbopropulseur) est placé sur l’arbre qui commande directement l’hélice. Toutefois, le turboréacteur fonctionne au carburant. Il est également possible, à tout moment, de choisir entre ces deux types d’énergie pour assurer la propulsion.
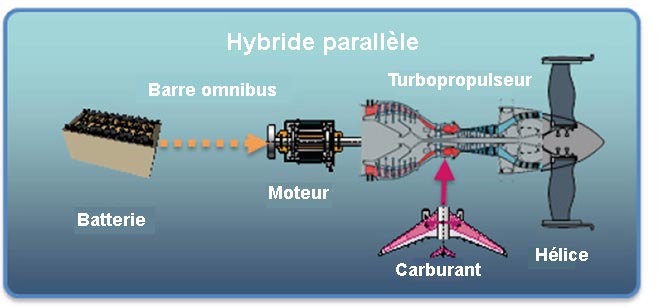
Figure 2 Architecture hybride parallèle
Dans une architecture hybride en série (figure 3), la turbine à essence, ou le turbomoteur, entraîne un générateur électrique, transformant l’énergie mécanique en énergie électrique pour alimenter les moteurs et charger les batteries. Les hélices sont installées mécaniquement sur les arbres du moteur électrique. Ce type d’architecture illustre le concept de propulsion distribuée, car il comporte plusieurs moteurs et hélices.
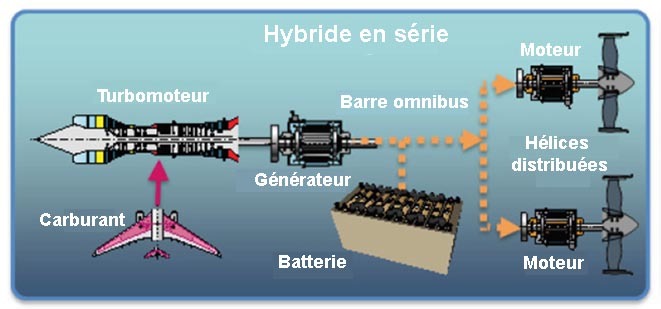
Figure 3 Architecture hybride série
L’architecture hybride partielle en série/parallèle combine les configurations hybrides parallèles et en série (figure 4). Une turbine à gaz ou un turboréacteur est alimenté de carburant et entraîne un générateur électrique. L’arbre de turbine se compose d’une hélice et d’un générateur électrique. Le générateur, entraîné par la turbine, fournit de l’énergie aux batteries ou au moteur et les batteries peuvent également alimenter ces moteurs si nécessaire. La propulsion est générée par l’hélice du turboréacteur, la distribution des hélices se trouvant sur les moteurs multiples ou les deux.
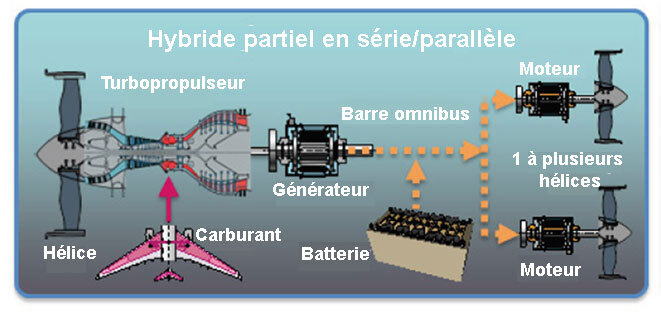
Figure 4 Architecture hybride partielle série/parallèle
Les architectures tout turboélectriques et partielles (figure 5) n’utilisent pas de batteries pour la propulsion en vol, mais plutôt des turbines à gaz pour entraîner directement un ou plusieurs générateurs électriques, qui alimentent les onduleurs et les moteurs. Ces moteurs électriques commandent les hélices électriques distribuées.
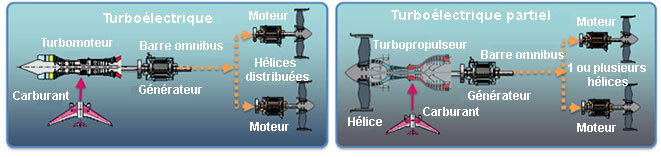
Figure 5 Architectures turboélectriques complète et partielle
L’architecture turboélectrique partielle est formée de moteurs électriques couplés à des hélices et un turboréacteur commandé par turbine à gaz pour fournir la puissance de propulsion. Dans le cas d’un système tout turboélectrique, seuls les moteurs électriques assurent la propulsion. Ces architectures ne reposent ni sur des batteries ni sur des technologies de stockage d’énergie. Les contrôleurs et les composants électriques dans un système tout turboélectrique sont moins avancés et complexes que dans un système turboélectrique partiel. Surtout, la commande sera moins complexe à réaliser dans une architecture tout turboélectrique, car la commande d’un moteur électrique multiple est relativement simple.
Les architectures de propulsion turboélectrique et autres s’adaptent bien à la propulsion distribuée plutôt que les systèmes hybrides électriques et tout électriques. En effet, la puissance et la capacité que doivent fournir les batteries sont très limitées pour les vols de longue durée. La propulsion turboélectrique constitue un sujet de recherche prometteur en matière de propulsion avancée et pourrait mener, par le fait même, à la réduction des émissions de CO2.
Simulation de systèmes d’alimentation d’avions plus électriques
Il est nécessaire de concevoir des outils et des processus de niveau aérospatial dédiés à la conception de systèmes de propulsion électrique intégrés (IEPS) pour les véhicules aériens modernes. Notre projet de recherche a pour but de créer une plate-forme de simulation pour le système de distribution d’énergie électrique afin d’analyser les problèmes de stabilité du réseau, le contenu harmonique« Les courants harmoniques sont dus à la présence de charges électriques non linéaires dans un réseau électrique. (…) ces courants harmoniques sont la cause de l’apparition d’harmoniques de tensions qui affectent alors les autres clients du réseau de distribution. (…) L’installation de filtres, passifs ou actifs, le choix d’un couplage de transformateur adapté ainsi que de montage d’électronique de puissance produisant moins d’harmoniques sont autant de solutions pour limiter le taux de distorsion du courant et de la tension électrique. » Ref. Wikipedia, les phénomènes transitoires électromagnétiques« Un certain nombre de phénomènes électriques correspondant à des variations brutales des grandeurs électriques d’un système ou d’un réseau peuvent être regroupés sous l’appellation « transitoires électromagnétique ». On peut y trouver les phénomènes de résonnance, de ferrorésonnance, de surtensions à front plus ou moins rapide telles que la tension transitoire de rétablissement aux bornes d’un disjoncteur ou celle suivant un impact de foudre, ou encore l’impact du courant d’enclenchement des transformateurs. » Ref. Capsimulation.com et les défaillances électriques. L’approche dans la conception de ces modèles de simulation en temps réel se divise en trois phases. La figure 6 représente les différentes phases d’une simulation.
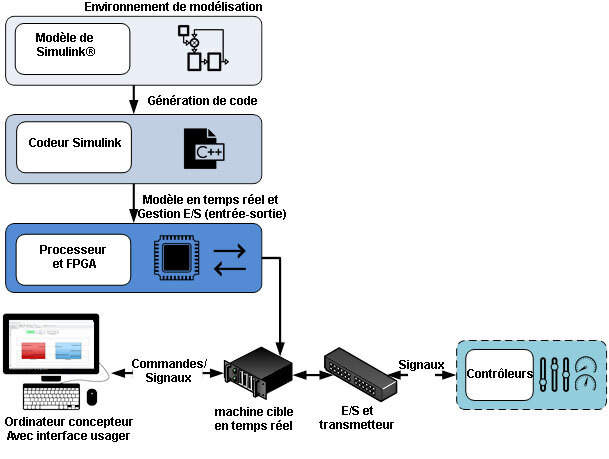
Figure 6 Les étapes de simulation
La première étape consiste à rassembler les différents modèles requis pour effectuer la simulation. La grande majorité de ces modèles existent déjà dans la boîte à outils du logiciel de simulation MATLAB-Simulink. Sinon, il est nécessaire de développer des modèles numériques et des outils de simulation pour concevoir des systèmes électriques plus efficaces (pour corriger les erreurs de conception et éliminer des étapes de prototypage). Ces modèles doivent être aussi précis et fidèles que possible. En utilisant les données et les hypothèses existantes, les modèles de composants de système d’alimentation sont interconnectés pour démontrer qu’il est possible d’effectuer des simulations complètes. Un autre travail important lors de cette phase consistera à ajuster les paramètres de ces modèles (paramètres machine, gains contrôlés, etc.)
La deuxième phase consistera à construire le modèle complet en simulation hors lignePar opposition à « simulation en ligne ». NDT. La simulation hors ligne comporte plusieurs objectifs. Le premier objectif est de déterminer la viabilité du modèle complété en vérifiant qu’il n’y a pas diminution de la précision causée par la discrétisation« Discrétiser une variable quantitative c’est, mathématiquement, transformer un vecteur de nombres réels en un vecteur de nombres entiers nommés « indices de classe ». C’est pourquoi effectuer cette transformation se dit en langage courant « réaliser un découpage en classes ». En statistiques, discrétiser c’est à la fois réaliser cette transformation mathématique, nommer et justifier les classes. » Ref. univ-angers.fr nécessaire à la transition en temps réel. Le deuxième objectif est d’étudier l’effet causé par la séparation des modèles« Étape d’optimisation qui consiste à diviser le modèle entier en sous-modèles pour résoudre les équations plus rapidement. » NDT. La séparation est la dernière étape de l’optimisation et est nécessaire aux calculs effectués sur processeurs multiples pendant la simulation en temps réel. Puisque les délais causés par cette séparation ont une influence sur la précision et la stabilité de la simulation, il est très important d’étudier leurs effets en profondeur.
Une fois la phase de simulation hors ligne terminée, la troisième et dernière phase consistera à mettre en fonction le modèle en temps réel. Les outils de simulation en temps réel offrent l’avantage de la vitesse des calculs et permettent d’étudier un très grand nombre de scénarios opérationnels dans un temps réduit. Ils pourraient également permettre d’étudier un grand nombre de scénarios opérationnels et de détecter les conditions de défaillance. De plus, de tels outils peuvent fournir des simulations synchronisées en temps réel et permettre l’interface avec un équipement physique externe (hardware-in-the-loop). Ce type d’interface sert à valider les contrôleurs physiques, à améliorer la conception et à concevoir des modèles grâce à l’analyse des courbes de performance des appareils physiques de type boîte noire.
La figure 7 représente une plate-forme de simulation typique pour un système d’alimentation d’avions plus électriques combinant un modèle d’avion de haute précision avec des appareils contribuant à la propulsion comme des convertisseurs de puissance, des générateurs, et des charges actives et statiques.
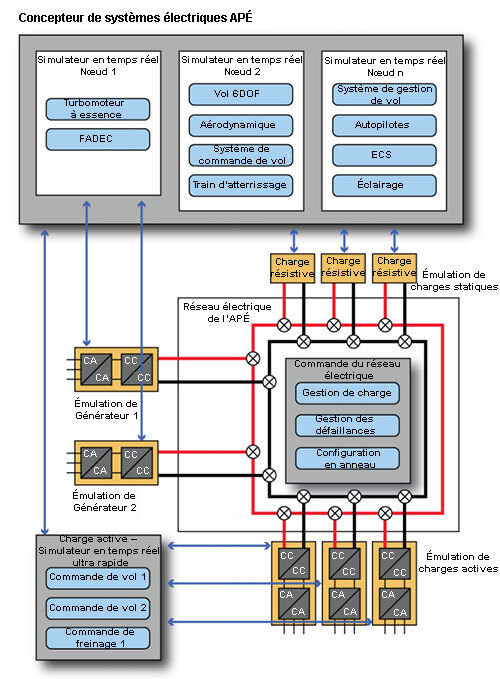
Figure 7 Conception de systèmes d’alimentation électrique pour avions plus électriques


