
Un mécanisme pour reproduire la biomécanique de la mâchoire
Achetée sur Istockphoto.com. Droits d’auteur.
Bien que des études aient démontré que les mouvements de la mâchoire déforment le conduit auditif, leurs actions mutuelles ne sont pas totalement comprises. L’objectif de l’étude est de concevoir un simulateur de mâchoire qui, combiné à une oreille artificielle, permettra d’étudier le couplage anatomique entre la mâchoire et le conduit auditif. L’algorithme proposé permet la conception d’un mécanisme reproduisant la cinématique de la mâchoire avec une précision de 98,35 %. Une meilleure compréhension de la relation entre la mâchoire et le conduit auditif permettrait d’améliorer l’ergonomie des bouchons et particulièrement le confort ainsi que l’étanchéité acoustique des technologies intra-auriculaires. Mots-clés: articulation temporo-mandibulaire, biomécanique, conception mécanique
Mâchoire et conduit auditif : une relation anatomique encore incomprise
Aussi surprenant que cela puisse paraître, les mouvements de l’articulation temporo-mandibulaire (ATM), plus connue sous le nom de mâchoire, modifient la forme de notre conduit auditif [1]. Ce phénomène que les chercheurs appellent « mouvement dynamique du conduit auditif » a d’ailleurs suscité un intérêt particulier. En effet, des études se sont penchées sur l’évaluation du potentiel énergétique des déformations du conduit auditif induites par le mouvement de la mâchoire [2,3]. Bien que les résultats soient prometteurs, les études menées se sont concentrées uniquement sur le conduit auditif en omettant de modéliser le comportement de la mâchoire. Cela s’explique par le manque de connaissance sur la relation anatomique entre le conduit auditif et la mâchoire. Cette lacune empêche, par conséquent, la caractérisation précise du potentiel maximal de ce gisement énergétique.
Pour remédier à cette problématique, l’objectif de notre étude est de concevoir un mécanisme reproduisant la biomécanique de la mâchoire afin d’étudier la relation anatomique entre le conduit auditif et l’ATM.
La biomécanique de l’articulation temporo-mandibulaire (ATM)
L’ATM est une double articulation reliant la mâchoire au crâne par l’intermédiaire des condyles mandibulaires. Chaque condyle mandibulaire est logé dans la partie du crâne appelée fosse temporale. C’est le profil de cette dernière que suit le condyle mandibulaire lorsque l’on ouvre la bouche. L’axe virtuel passant par le centre des 2 condyles mandibulaires, appelé « axe charnière », est très souvent utilisé comme référence en biomécanique. C’est d’ailleurs à partir de cet axe, comme le montre la Figure 1, que sont définis les 3 paramètres décrivant la cinématique d‘ouverture de la mâchoire : (1) la trajectoire condylaire qui représente le chemin parcouru par le centre du condyle mandibulaire [4], (2) la trajectoire incisale qui représente le chemin parcouru par l’extrémité de la dent incisive et (3) la rotation de la mâchoire autour de l’axe charnière [5].
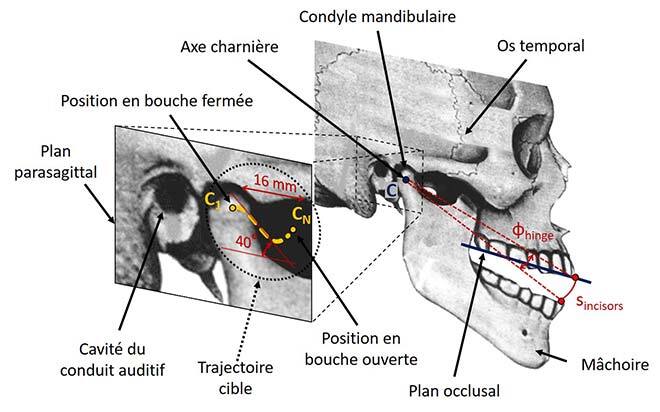
Figure 1 : Modèle biomécanique de l’ATM illustrant les 3 paramètres définis par l’axe charnière (point C) : la trajectoire condylaire (C1 CN), la trajectoire incisale (s_incisors) et la rotation de la mâchoire (Φ_hinge). [6]
Conception d’un mécanisme à 6 barres
Le mécanisme que nous avons conçu (cf. le modèle numérique en Fig.2) permet de reproduire la trajectoire condylaire avec une précision de 98,35%, tout en garantissant la trajectoire incisale et la rotation de la mâchoire autour de l’axe charnière. L’originalité de notre solution ne réside pas dans l’architecture en tant que telle du mécanisme, mais plutôt dans la méthode de conception. En effet, nous avons séparé notre mécanisme en deux sous-mécanismes.
Dans un premier temps, un algorithme d’optimisation a permis de déterminer la valeur des 11 variables décrivant le mécanisme 4 barres formé par l1, l2, l4 et le triangle dont fait partie l3. Grâce à une approche d’optimisation itérative, ce dernier a minimisé l’écart entre la trajectoire générée au point C et la trajectoire condylaire cible, tout en respectant que le point A devait reproduire la trajectoire incisale.
Une fois la génération des 2 trajectoires validées, nous avons intégré un sous-mécanisme additionnel composé des barres l5 et l6. Grâce à une méthode analytique, il a été possible de contraindre le mouvement de la barre l6 de manière à ce que sa rotation corresponde à celle effectuée par la mâchoire autour de l’axe charnière, et cela sans perturber la cinématique du premier sous-mécanisme.
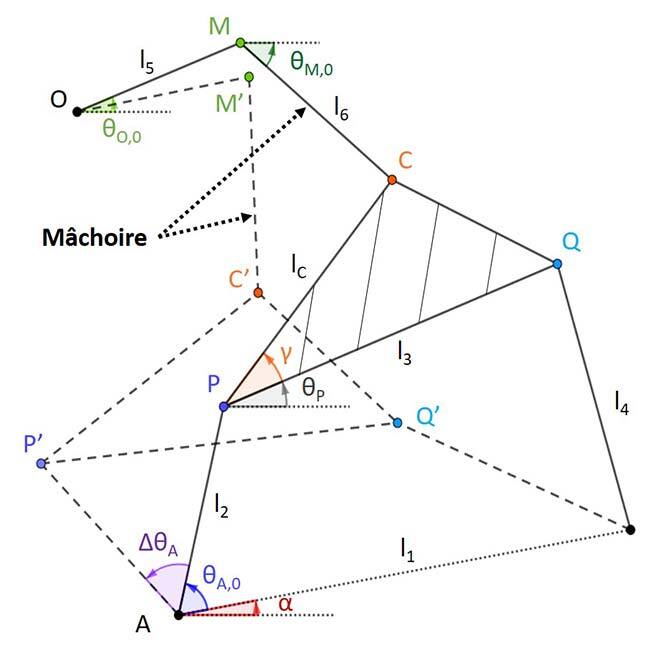
Figure 2 : Représentation schématique du mécanisme 6 barres avec les variables de conception: l1, l2, l3, l4, lC, α, θA0, ΔθA , γ, xA, yA pour le sous-mécanisme à 4 barres et l5, l6, θO0, θM0, xO ,yO pour le sous-mécanisme à 2 barres. La position initiale est symbolisée en trait plein. [6]
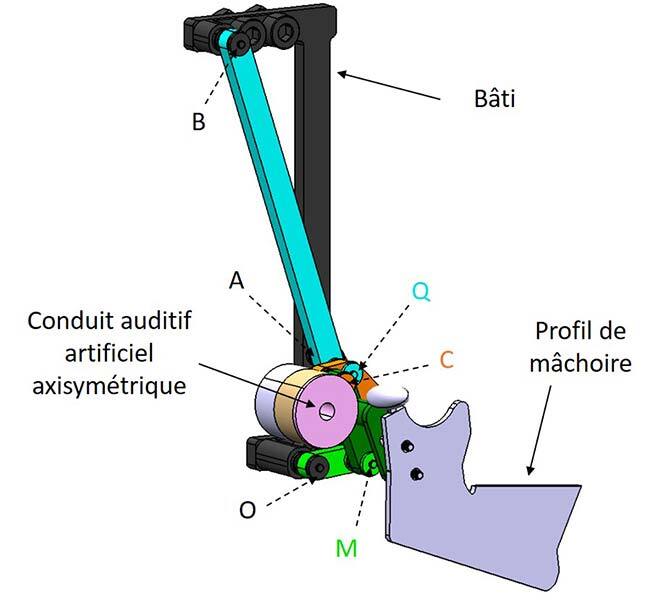
Figure 3: Modèle numérique du mécanisme 6 barres optimisé. À gauche : vue 3D avec le profil de la mâchoire et une représentation d’un conduit auditif artificiel; à droite : vue agrandie de la trajectoire optimisée (pointillés) et de la trajectoire cible (trait plein) avec l’orientation de la mâchoire le long de la trajectoire générée par le mécanisme. [6]
Perspectives de recherche
Couplé à une oreille artificielle, le mécanisme cinématique fournira une plateforme de test permettant de mieux comprendre les interactions entre la mâchoire et le conduit auditif. Il sera alors possible de développer des simulations numériques modélisant cette interaction et comparer les résultats numériques et expérimentaux. L’objectif final de ce projet serait de parvenir à localiser et quantifier la déformation maximale du conduit auditif et d’en déduire le potentiel énergétique associé. Il serait alors possible de grappiller ce gisement énergétique à l’aide d’un bouchon instrumenté d’un capteur piézoélectrique.
Bien que le prototype ne reproduise qu’une unique anatomie, il est tout à fait envisageable de remplacer les barres de notre prototype par des barres ajustables. De plus, il serait envisageable de remplacer le triangle par un compas dont l’angle est ajustable. Cela permettrait de simuler plusieurs anatomies et par conséquent plusieurs cinématiques de l’ATM. Ce mécanisme ajustable pourrait, entre autres, être utilisé pour mieux comprendre les troubles de l’ATM et ainsi améliorer la conception des implants mandibulaires.
D’un point de vue théorique, la méthode d’optimisation proposée dans notre étude pourrait être utilisée pour optimiser l’architecture des mécanismes biomédicaux avec des cinématiques complexes tels que les prothèses de genou ou d’épaule.
Information supplémentaire
Pour plus d’informations, consulter l’article de recherche suivant :
Demuynck, M., Delnavaz, A., and Voix, J. (June 1, 2021). « Human Temporomandibular Joint Motion: A Synthesis Approach for Designing a Six-Bar Kinematic Simulator. » ASME. J. Mechanisms Robotics. December 2021; 13(6): 065001. https://doi.org/10.1115/1.4050828.


