
5 juin 2023
Le chemin qui a mené Jean-Philippe Roberge à s’intéresser à l’intelligence artificielle est des plus inusités : le système nerveux d’un rongeur.
L’image appartient à Jean-Philippe Roberge. Droits d’auteur.
Pendant ses études de premier cycle, Jean-Philippe Roberge a vu en classe une vidéo qui expliquait comment des neurones de rat avaient appris à piloter un simulateur d’avion de chasse. Le déclic a été instantané. Par la suite, ce champ d’intérêt s’est développé graduellement chez lui, au fil des cours avancés et des discussions avec des membres du corps professoral de son université, mais le déclencheur reste cher à sa mémoire. « Je montre encore cette vidéo à mes propres étudiants et étudiantes », dit-il.
Combiner la vision et le toucher
Professeur au Département de génie des systèmes de l’École de technologie supérieure (ÉTS) depuis 2020, Jean-Philippe Roberge s’intéresse aux applications de l’intelligence artificielle en robotique.
Dans ses travaux, il collabore avec de nombreux partenaires industriels, notamment des PME québécoises aux prises avec une pénurie de main-d’œuvre qualifiée. « Il faut se préoccuper de ce problème, dit-il. D’autant plus que notre taux de robotisation est largement inférieur à ce que l’on observe dans d’autres pays. Nous avons du rattrapage à faire. »
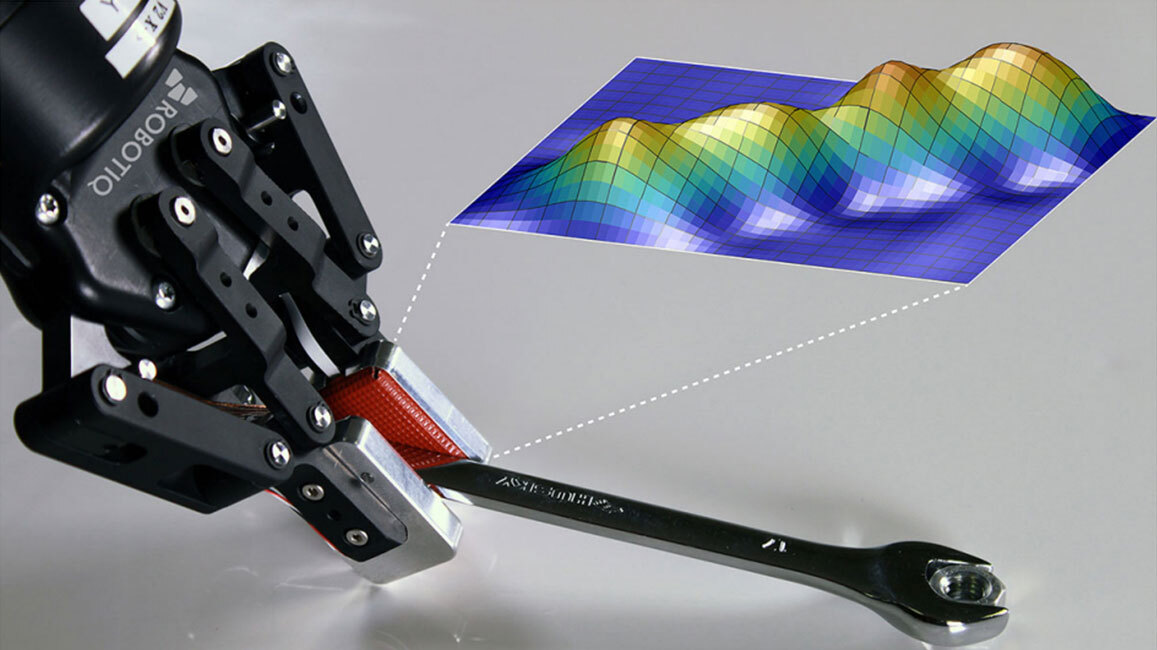
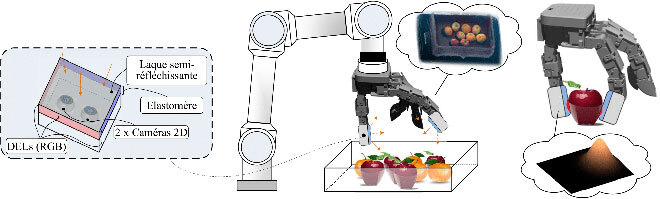
La vision artificielle, qui permet aux robots de comprendre ce qui les entoure, de se déplacer et de saisir le bon objet au bon moment, préoccupe la science depuis des décennies. Mais l’œil, qu’il soit humain ou artificiel, n’est pas toujours suffisant. Ainsi, le champ de vision du robot peut être obstrué, notamment par son propre préhenseur. Faire appel au sens du toucher peut alors devenir très avantageux. La manipulation d’objets fragiles et/ou déformables bénéficie aussi grandement d’une autre source d’information comme le toucher.
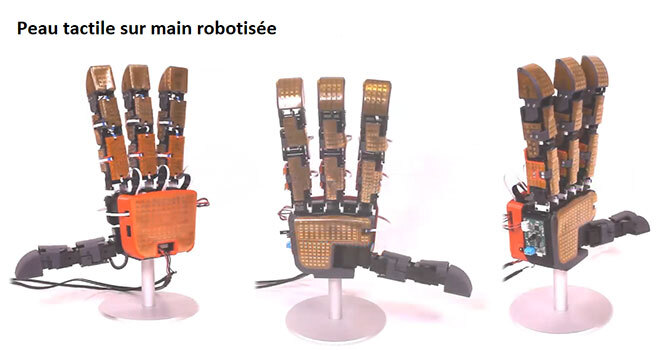
Pour ce faire, il faut équiper le robot de capteurs tactiles sophistiqués, qui détectent, entre autres, les contacts avec les surfaces et les vibrations émises lors d’opération de manipulation. Les algorithmes d’intelligence artificielle permettent d’analyser les données tactiles ainsi captées afin d’identifier des objets par le toucher ou de détecter des phénomènes dynamiques comme le glissement d’un objet du préhenseur du robot pour rectifier sa prise avant que l’objet ne tombe au sol. Cette capacité constitue un bel exemple de réflexes en robotique commandée par perception tactile, qui amène les robots à démontrer plus d’adresse lors de tâches de manipulation.
Apprendre par l’expérience
C’est donc en apprenant aux robots à exploiter à la fois la vision et le toucher que Jean-Philippe Roberge souhaite rehausser leur dextérité. Ce projet, financé par le Conseil de recherches en sciences naturelles et en génie du Canada, exige le traitement rapide d’une vaste quantité de données « visuotactiles », pour permettre au robot de prendre des décisions.
« Ce sont des problèmes de perception avancés, qui exigent de grandes quantités de données, explique-t-il. Il est très difficile de programmer ce genre de comportements à la main, ce qui rend l’apprentissage automatique indispensable. »
L’apprentissage par renforcement constitue une des techniques d’intelligence artificielle privilégiées, car elle permet au robot d’apprendre les meilleures actions à choisir afin d’accomplir un objectif donné. Il s’agit d’une méthode qui permet à un agent autonome, comme un robot, d’effectuer des expériences, de prendre des décisions en fonction de son état et de son environnement, puis d’ajuster son comportement en conséquence. Au fil du temps, le robot apprendra à maximiser une « fonction de récompense » qui décrit l’objectif à atteindre.
Synthétiser des données artificielles
Qui dit apprentissage automatique, dit données d’entraînement, beaucoup de données. Laisser un robot expérimenter librement peut cependant coûter cher. Surtout s’il doit manipuler des objets fragiles et onéreux ! C’est ici qu’intervient un autre des axes de recherche de Jean-Philippe Roberge : la génération de données synthétiques.
« Pendant mon doctorat, il m’a fallu des mois d’expérimentation pour obtenir 1 500 échantillons », indique-t-il. Aujourd’hui, des doctorants qui travaillent sous sa direction peuvent produire des données d’entraînement synthétiques par dizaines de milliers afin de permettre aux robots d’apprendre sans manipuler d’objets réels.
Encore beaucoup de recherche sur la planche
Les robots finiront peut-être par gagner nos maisons, mais il faudra réaliser d’importantes percées dans le traitement des signaux visuotactiles avant d’y parvenir.
Et si l’intelligence artificielle est un outil puissant, elle ne constitue pas une panacée. « On est encore loin de la conscience humaine. La vision en trois dimensions est encore souvent coûteuse et compliquée. Et malgré toute la puissance des algorithmes, il reste des problèmes matériels à résoudre. » De quoi occuper la prochaine génération de chercheurs !

Jean-Philippe Roberge, professeur à l’ÉTS


