
Prédire la trajectoire d’un débris de glace autour d’un avion en vol

Achetée sur Istock.com. Droits d’auteur.
Lorsqu’un avion rencontre des conditions météorologiques givrantes, de la glace peut se déposer à la surface de l’appareil. Les débris de glace délogés par la mise en action des systèmes de dégivrage peuvent devenir des projectiles dangereux, dont la trajectoire doit être connue. Un article précédent publié dans Substance posait les bases et les fondements du calcul de la trajectoire d’un débris de glace autour d’un avion. Dans la présente étude, le débris est considéré comme ayant une forme de plaque mince. L’objectif est de proposer un modèle mathématique pour le moment d’amortissement en 3D afin d’améliorer les modèles employés dans la littérature. Ce moment d’amortissement permet de borner la vitesse de rotation de la plaque sur elle-même et ainsi éviter l’atteinte de cas extrêmes, où les vitesses angulaires sont excessivement grandes ou, au contraire, nulles. Après avoir explicité les équations de calcul de trajectoires, l’article s’attarde sur l’expression du moment d’amortissement. Le modèle sera tout d’abord comparé aux observations expérimentales de Tachikawa (1983) pour vérification. Par la suite, la mise en application est illustrée avec des calculs de trajectoire autour d’un avion de type aile volante.
Le calcul de trajectoire
La prédiction de la trajectoire d’un projectile a fait l’objet de nombreuses études en balistique et en génie civil. Le calcul de trajectoires, par exemple, permet de prévenir les risques liés aux gros débris emportés par des tornades (Fu, Huang, & Gu, 2013). Des modèles numériques et des résultats expérimentaux ont ainsi été générés pour prédire la trajectoire d’un débris en mouvement dans l’air. La présente étude applique le calcul de trajectoires au domaine du givrage en aéronautique. Des accrétions de glace peuvent se former à la surface d’un avion en raison des conditions climatiques. Lors de l’activation des systèmes de dégivrage en vol, la glace peut se détacher de la surface et se transformer en projectiles dangereux pour les moteurs ou la structure de l’avion. Il convient donc de pouvoir prévoir la trajectoire des débris pour éviter de placer des éléments critiques de l’avion, comme les moteurs, dans une zone de passage de débris.
Le présent article vise à détailler la façon de calculer numériquement la trajectoire d’un débris de glace en forme de plaque mince à partir de la seconde loi de Newton. Le cœur de l’article portera sur la modélisation du moment d’amortissement, paramètre essentiel au mouvement rotatif de la plaque, responsable du fait que la vitesse angulaire d’un débris ne peut tendre ni vers l’infini, ni vers zéro. Le travail de recherche a consisté à proposer un nouveau modèle mathématique pour ce moment d’amortissement.
Modèles mathématiques employés
Les équations de base régissant le mouvement d’un débris sont les équations de la seconde loi de Newton. Cette loi comporte deux composantes : la translation (équation 1) et la conservation du moment cinétique (équation 2). Le paramétrage du problème dans le cas d’un débris en forme de plaque mince est présenté à la figure 1.
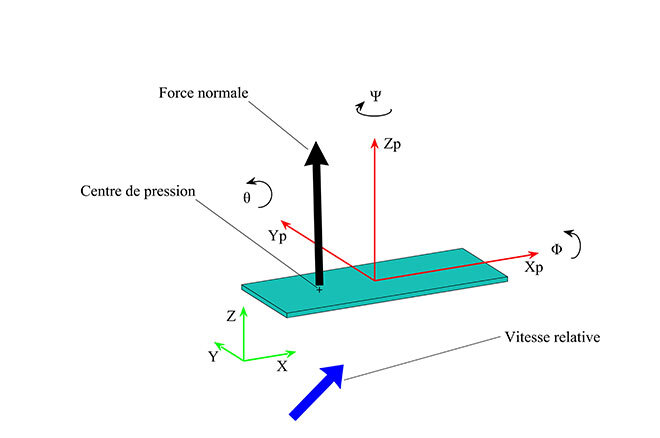
Figure 1 Paramétrage d’une plaque mince.
La composante de translation de la seconde loi de Newton est appliquée dans chacune des directions du repère fixe (X, Y, Z), exprimant ainsi le mouvement de translation de la plaque dans ces trois directions. La composante de rotation est, quant à elle, appliquée dans les directions du repère mobile lié à la plaque (XP, YP, ZP), exprimant ainsi le mouvement de rotation autour de ces trois axes :
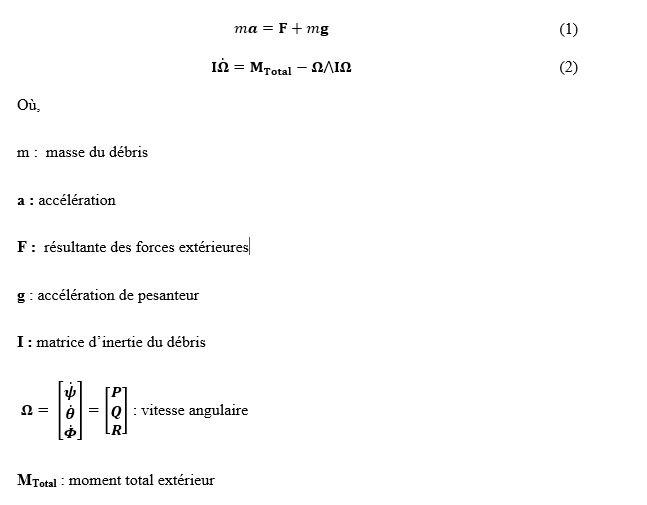
La résolution simultanée des équations (1) et (2) permet de connaître à chaque instant la position, la vitesse, l’orientation et la vitesse angulaire du débris.
Le moment d’amortissement
Le point qui a mobilisé les efforts du projet de recherche portait sur le moment d’amortissement dynamique. Ce moment est l’une des composantes du moment MTotal, où :

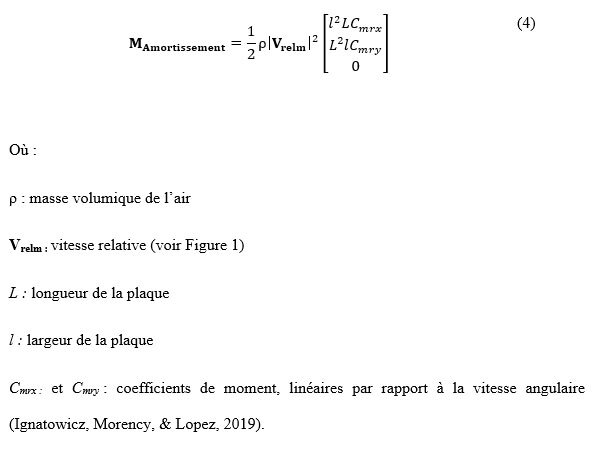
Maéro étant le moment causé par la force aérodynamique au centre de gravité de l’objet. Cette force est notée Force normale sur la Figure 1. La revue de littérature fait ressortir une disparité quant à la modélisation de MAmortissement: certains auteurs retiennent une valeur constante (Suares, 2005), tandis que d’autres emploient des modèles linéaires (Tachikawa, 1983) voire quadratiques (Richards, Williams, Laing, McCarty, & Pond, 2008) par rapport à la vitesse angulaire. Le modèle quadratique a, dans un premier temps, été retenu.
Ce modèle quadratique permet une bonne corrélation par rapport aux trajectoires 3D obtenues par Richards et coll. (2008). Néanmoins, et comme il sera montré un peu plus loin, ce modèle prédit au bout d’un certain temps un arrêt des rotations de la plaque, qui continue donc son mouvement dans un régime de translation pure, ce qui est contraire aux observations expérimentales de Tachikawa (1983). Ce constat a entraîné le développement d’un nouveau modèle, basé sur le modèle linéaire de Tachikawa :
Résultats des simulations
Les simulations de trajectoires ont été effectuées au moyen de deux modèles de moment d’amortissement : celui de Richards et coll. (2008) et le nouveau modèle développé.
Le cas test de vérification est le suivant :
- Plaque mince (L = 0,2122 m, l = 0,1061 m d’une épaisseur de 2 mm);
- Densité de la plaque de 170 kg/m3;
- Écoulement d’air selon l’axe X (voir figure 1) uniforme à 10 m/s;
- Orientation initiale de la plaque : Ψ = 30°, θ = 20° et Φ = 30° (voir figure 1).
La figure suivante illustre la variation de la valeur du moment d’amortissement selon l’axe YP et la vitesse angulaire Q = autour de l’axe YP en fonction de la distance parcourue en X.
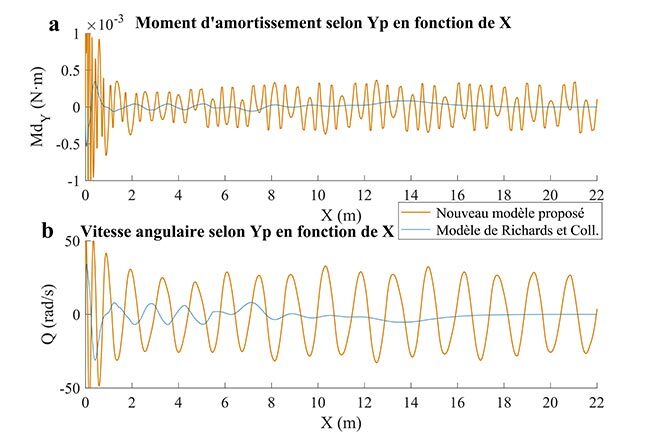
Figure 2 Moment d’amortissement (a) et vitesse angulaire (b) selon YP en fonction de X.
La comparaison effectuée permet d’observer que les deux modèles prédisent un comportement différent : le modèle de Richards et coll. amortit fortement la rotation de la plaque, ce qui provoque un arrêt de la rotation après un certain temps (Figure 2b). Ceci est dû au fait que le moment de Richards et coll. est constamment opposé à la vitesse de rotation. Le nouveau modèle, quant à lui, permet de conserver la rotation pendant tout le déplacement en X et ne s’oppose à la vitesse de rotation que lorsque cette dernière dépasse une valeur critique (Ignatowicz et coll., 2019). Le nouveau modèle ne prédit donc pas à la plaque un mouvement évoluant en translation pure, ce qui est en accord avec les observations expérimentales de Tachikawa (1983).
La mise en application de l’outil de simulation dans le cadre du calcul de trajectoires de débris de glace autour d’un avion permet également d’observer que la trajectoire du débris est sensible au choix du modèle de moment d’amortissement. Les trajectoires étudiées concernent des débris de glace se détachant de l’aile, ce qui est fréquent, notamment en phase de dégivrage en vol. Pour estimer la localisation des débris de glace en mouvement au niveau des moteurs de l’appareil, la dispersion d’un échantillon statistique de débris de glace est observée dans le plan transversal illustré à la figure 3.
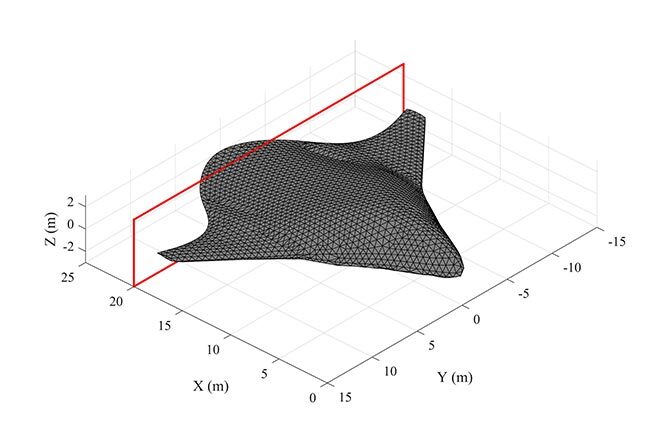
Figure 3 Plan (en rouge) dans lequel les passages de débris de glace sont observés
Pour obtenir un échantillon statistique représentatif, les trajectoires de 300 plaques minces sont simulées, d’une vitesse et d’une orientation initiales aléatoires pour les deux modèles de moment d’amortissement. La position initiale est aussi choisie aléatoirement autour de l’aile. La figure 4 illustre les dispersions obtenues dans le plan mis en avant à la figure 3.
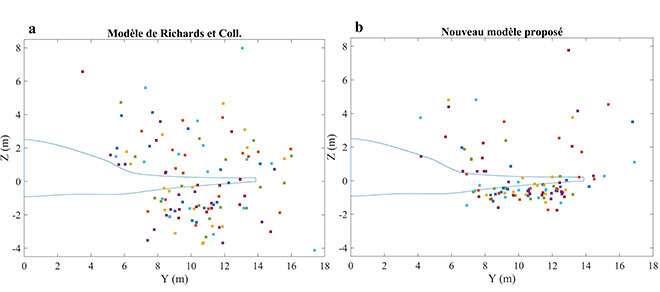
Figure 4 Dispersion des débris de glace à l’arrière de l’avion pour chacun des modèles de moment d’amortissement : Richards et coll. (a) et le nouveau modèle (b)
La différence entre les deux modèles est observable sur la figure précédente : le modèle de Richards et coll. prédit une dispersion bien plus grande, notamment selon l’axe Z. Ceci est dû au fait que les plaques arrêtent de tourner à un certain moment, ce qui tend à fixer leur direction de translation. Au contraire, le nouveau modèle laisse les plaques libres de tourner, ce qui leur permet d’avoir un mouvement de translation qui suit l’écoulement d’air autour de l’avion. Le nouveau modèle prédit donc des trajectoires plus proches des observations expérimentales.
Conclusion
Dans le cadre de l’étude de la trajectoire de débris de glace autour d’un avion, un nouveau modèle de moment d’amortissement pour un débris mince a été proposé. Celui-ci innove en offrant au débris des caractéristiques rotationnelles différentes par rapport aux modèles précédents de la littérature. En effet, le débris conserve une certaine rotation durant son vol, mouvement non observé avec le modèle de Richards et coll. Cette caractéristique est une amélioration puisqu’elle correspond aux observations expérimentales de Tachikawa (1983), qui a conclu qu’un débris mince en rotation n’évolue jamais vers un état de translation pure.
Information supplémentaire
Pour plus de détails techniques et d’informations sur ce projet de recherche, vous pouvez consulter l’article suivant :
Ignatowicz, K., Morency, F., & Lopez, P. (2019). « Dynamic Moment Model for Numerical Simulation of a 6-DOF Plate Trajectory around an Aircraft ». Journal of Aerospace Engineering, 32(5), 04019069.


