
Et si on pouvait voir le bruit ?
Provient des auteurs. Licence CC.
Contrairement à la lumière, le bruit n’est pas visible à l’œil nu, mais perceptible par les oreilles, qui transmettent l’information au cerveau afin de l’analyser. Ainsi, l’être humain est capable de dire approximativement si une source de bruit se trouve devant ou derrière lui, à gauche ou à droite, en détectant la différence d’intensité sonore ou le retard entre les sons qui atteignent chaque oreille.
Cette capacité à localiser le bruit se détériore dans un local industriel, car les sources de bruit sont multiples, les ondes se réfléchissent sur les parois et les machines, ce qui crée un champ acoustique complexe. Dans ce cas, l’audition n’est plus efficace pour localiser les sources de bruit. Or, les professionnels de l’acoustique ont besoin de connaître la position des sources afin de proposer des solutions de réduction de bruit efficaces.
Pour pallier ce problème de localisation, un projet de recherche, financé par l’Institut de recherche Robert-Sauvé en santé et en sécurité du travail (IRSST), vient de démarrer à l’ÉTS, en collaboration avec l’Université de Sherbrooke, afin de développer une caméra acoustique. L’objectif est de voir le bruit en temps réel. Telle une caméra thermique qui indique les points chauds de température, la caméra acoustique affichera les points chauds de décibels à la position des sources permettant ainsi de voir le bruit.
Le bruit au travail, un problème criant!
Au Québec, plus de 74 000 travailleurs ont eu une surdité professionnelle acceptée par la Commission des normes, de l’équité, de la santé et de la sécurité du travail entre 1997 et 2016. Pour les années 2010 et suivantes, c’est environ 6 000 cas par année. Le nombre de cas de surdités professionnelles a été multiplié par cinq entre 1997 et 2016. Entre 287 000 et 359 000 travailleurs seraient encore exposés quotidiennement à des niveaux de bruit nocifs. La surdité est la maladie professionnelle de loin la plus recensée au Québec et est un problème actuel majeur qui nécessite de mettre en place des mesures de contrôle du bruit.

Le contrôle du bruit
Dans les milieux de travail, trois niveaux de contrôle existent pour une saine gestion du bruit :
- Niveau 1 – Éliminer ou modifier la source de bruit;
- Niveau 2 – Réduire le bruit lors de sa propagation grâce à la mise en place de matériaux ou d’écrans acoustiques;
- Niveau 3 – Protéger la personne avec des équipements de protection individuel (ÉPI);
Bien que l’utilisation d’ÉPI soit la solution la plus simple et la plus répandue, voire même parfois la seule possible, celle-ci n’est pas encore optimale quant à la protection procurée et doit être proposée en dernier recours. Les deux premiers niveaux de contrôle sont à privilégier, car ils sont plus efficaces, mais nécessitent de connaître la position et l’amplitude de la source de bruit. Cette étape de localisation peut être réalisée avec une caméra acoustique.
Voir le bruit grâce à une caméra acoustique
Une caméra acoustique est composée d’une antenne de microphones, d’une caméra optique et d’un algorithme de localisation de sources. Pendant que la caméra optique filme l’environnement, l’algorithme combine les signaux microphoniques afin de créer une image acoustique. Par la suite, les deux images, optique et acoustique, sont superposées. Le résultat est une image de l’environnement où des points chauds, à l’instar d’une caméra thermique, indiquent la position des sources là où le niveau de bruit en décibels est le plus élevé.
Les microphones peuvent être répartis sur un plan ou une sphère. Dans le premier cas, c’est l’environnement devant le plan de microphones qui est imagé acoustiquement alors que dans le second, la sphère, c’est tout l’espace entourant la caméra. C’est cette dernière solution qui a été retenue pour voir le bruit en milieux de travail. Lors de ce projet, deux sphères de microphones vont être étudiées. La première est une sphère creuse transparente acoustiquement, c’est-à-dire que les ondes acoustiques n’interagissent pas ou peu avec elle (Figure 1.a). La seconde est au contraire totalement pleine, dans ce cas les ondes acoustiques sont diffractées par la sphère (Figure 1.b). L’algorithme de localisation est adapté au type de sphère.
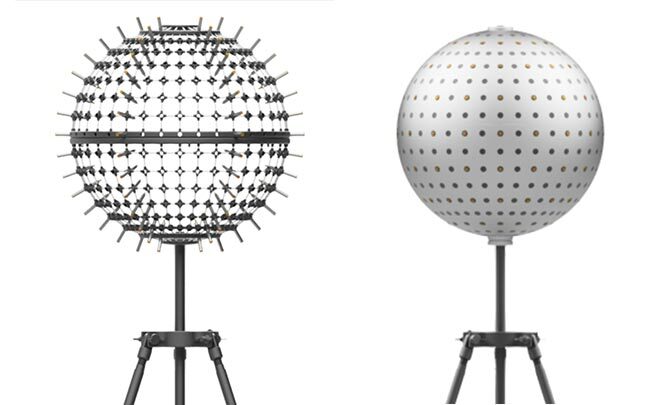
Figure 1 : Antennes sphériques de microphones, a) sphère creuse avec microphones sortant de la sphère et b) sphère pleine avec microphones affleurants à la sphère.
Une étude préliminaire lors d’un précédent projet financé par l’IRSST a permis d’évaluer les performances d’un algorithme de localisation de sources, basé sur les corrélations croisées généralisées, utilisé avec une sphère creuse [1]. Considérons une source de bruit générant des ondes acoustiques, ici, une perceuse à main, tenue par un opérateur (voir Figure 2).

Figure 2 : Photographie du milieu de travail où un opérateur tient une perceuse dans sa main.
Les ondes acoustiques émanant des sources ou des réflexions sur les parois du local se propagent vers l’antenne et sont captées par les microphones à différents instants en fonction de leurs positions. Le retard de propagation entre deux microphones est estimé grâce à la corrélation croisée des signaux, puis est ensuite projeté sur l’image, ce qui dessine un faisceau [2]. Pour obtenir l’image finale, les retards entre toutes les paires de microphones sont projetés sur l’image où les faisceaux se croisent à la position de la source (voir Figure 3). Dans ce cas, il est impossible de voir la source, car de nombreuses taches de couleurs sont présentes.
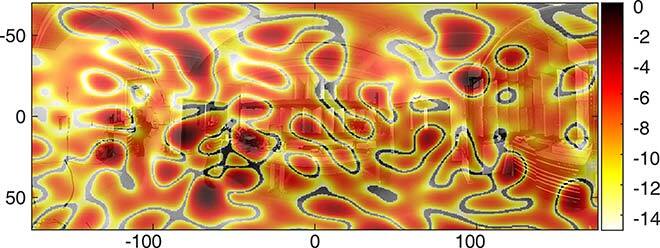
Figure 3 : Image acoustique obtenue avec une technique standard. La gamme dynamique de l’image va de 0 à – 15 dB.
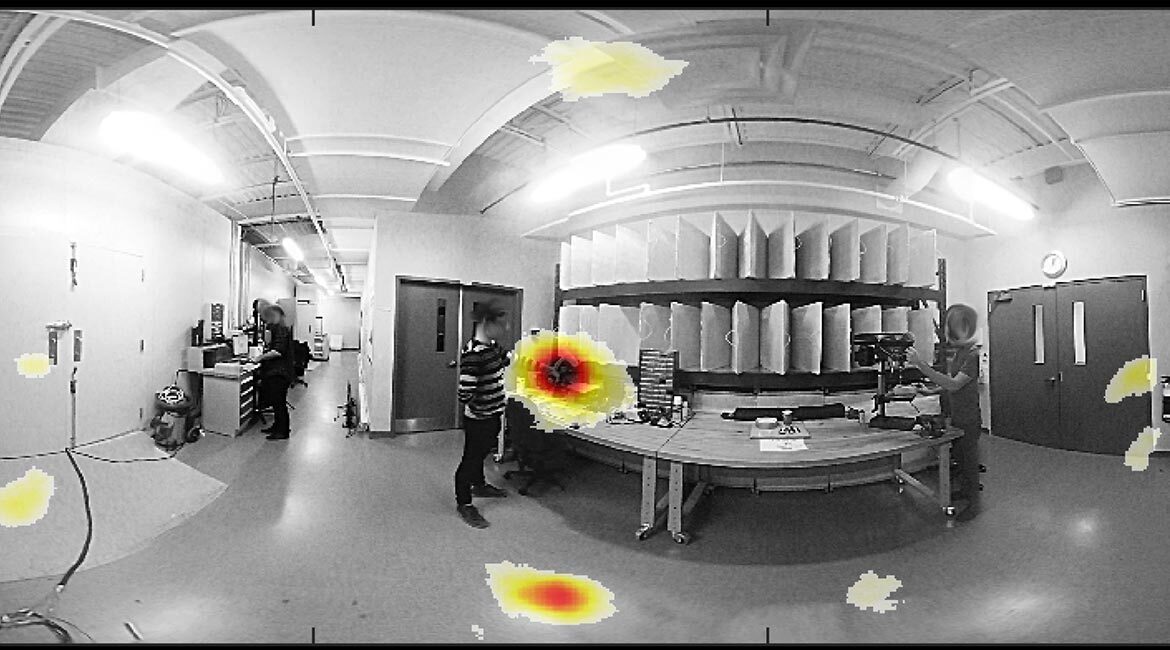
Pour augmenter la qualité de l’image, les auteurs ont développé des techniques permettant d’améliorer l’estimation des retards et la combinaison des faisceaux menant au résultat de la Figure 4 [3-5]. Maintenant, une tache principale se trouve au bout de la main de l’opérateur, là où est située la perceuse. Des taches secondaires de plus faibles amplitudes sont visibles et correspondent aux diverses réflexions acoustiques sur le sol, murs et plafond. Grâce à la caméra acoustique, il est possible de voir le bruit et d’appliquer les niveaux de contrôle 1 et 2, c’est-à-dire d’agir de façon appropriée sur la source de bruit et/ou installer des matériaux et écrans acoustiques adéquatement dimensionnés aux endroits les plus judicieux.
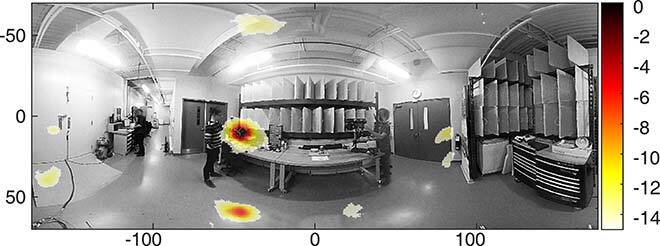
Figure 4 : Image acoustique obtenue avec une technique développée par les auteurs. La gamme dynamique de l’image va de 0 à – 15 dB.
Perspectives du projet
Lors de ce projet, les performances d’une panoplie d’algorithmes associée aux antennes creuses ou pleines vont être évaluées afin de déterminer quelle combinaison est la meilleure pour les milieux de travail. De plus, l’électronique embarquée permettant l’acquisition des signaux microphoniques et l’exécution de l’algorithme de localisation de sources en temps réel va être développée en partenariat avec l’Université de Sherbrooke. À terme, la caméra acoustique sera pilotable par une tablette munie d’une interface graphique permettant de voir le bruit. Cet instrument de mesure sera utile pour les professionnels en acoustique, qui pourront localiser précisément les sources et ainsi proposer des solutions de contrôle du bruit efficaces afin de réduire la surdité professionnelle.


