
Commande non linéaire pour robots manipulateurs avec bruit de mesure

Achetée sur Gettyimages. Droits d’auteur.
Cette recherche porte sur la création d’un schéma de commande permettant de relever les nombreux défis de commande robotique liés au bruit de mesure, aux perturbations externes et aux incertitudes paramétriques, en ne se basant que sur les positions articulaires. Le système de commande proposé comporte deux parties : un observateur d’état étendu (Extended State Observer, ESO) servant à estimer les vitesses des articulations et les incertitudes totales, tout en garantissant l’immunité au bruit de mesure dans la boucle de rétroaction, et une commande non linéaire (commande synergétique) assurant que le robot effectue la tâche souhaitée et que chaque articulation suive sa trajectoire respective définie et connue. Mots clés : Manipulateurs robotiques, observateurs d’état, observateurs d’état étendus, commande non linéaire et commande synergétique.
Facteurs de perturbations et d’incertitudes
Cette recherche a pour but de trouver une solution pratique pour la commande des robots manipulateurs munis de capteurs de position et soumis à des perturbations et incertitudes externes. Dans la pratique, les mesures des capteurs sont toujours sujettes au bruit. Ce bruit provient de fluctuations aléatoires ou d’imprécisions dans les valeurs mesurées. Les incertitudes sont dues aux imprécisions et au manque de prévisibilité d’éléments comme la masse d’un objet transporté et l’incertitude de l’actionneur. En effet, la masse de l’objet transporté par le robot n’est pas toujours connue. En outre, les actionneurs (moteurs) peuvent subir des variations de performance dues à l’usure, aux tolérances de fabrication et aux changements dans les conditions d’utilisation. Ces incertitudes peuvent affecter la précision des mouvements et des manipulations du robot.
Défis mathématiques posés par les perturbations
L’un des principaux défis consiste à formuler une description mathématique précise de ces perturbations afin de créer des algorithmes de commande pour les compenser. Ces perturbations externes sont l’effet de forces externes appliquées au robot lorsqu’il se déplace. Quantifier cet effet sur les stratégies de commande est complexe en raison de sa nature imprévisible et de l’absence d’un modèle mathématique dédié à ces comportements.
De nombreux systèmes robotiques utilisent les positions angulaires de leurs actionneurs pour obtenir les vitesses angulaires. Les positions et vitesses angulaires sont des concepts fondamentaux en robotique et jouent un rôle vital dans la maîtrise du mouvement et du comportement des manipulateurs robotiques. Toutefois, la dérivée numérique des mesures des capteurs des positions peut propager des erreurs en raison de sa sensibilité à la différenciation des variations des données d’entrée. Ce phénomène est souvent appelé propagation ou amplification des erreurs. Pour éviter d’encombrer le système avec des capteurs coûteux, la meilleure façon d’obtenir la vitesse est d’estimer sa valeur à l’aide de certains observateurs ou en concevant certains types de filtres.
Observateur d’état étendu
L’observateur d’état étendu (ESO) dans les systèmes de commande sert à estimer à la fois la dynamique interne et les perturbations externes. Sa capacité distinctive est de combiner toutes les sources d’incertitude, les non-linéarités non modélisées et les perturbations, en un seul terme de commande globale. Ce terme estimé est ensuite soumis à la régulation par une commande de rétroaction, améliorant ainsi la capacité du système à gérer et à atténuer efficacement ces facteurs complexes. La commande synergétique est une stratégie avancée de commande optimale non linéaire réputée pour sa robustesse, ce qui la rend très compatible aux environnements de commande numérique.
Ainsi, la fusion de la commande synergétique et de l’ESO produira un schéma de commande efficace et une solution robuste pour surmonter de nombreux problèmes de commande en robotique.
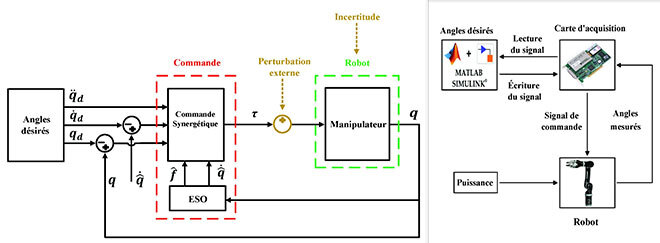
Figure 1. Schéma fonctionnel du système et de la commande



Les performances du schéma de commande proposé (commande synergétique basée sur l’ESO ont été testées expérimentalement et comparées à celles obtenues par la commande synergétique conventionnelle, tenant compte de trois études de cas différentes. Le troisième cas posait le plus grand défi : la trajectoire souhaitée passe de circulaire à conique. Dans ce cas, le robot a été soumis à des perturbations externes et à un ajout de poids, comme le montre la figure 2.

Figure 2. Poids ajouté dans les cas 2 et 3
Dans les résultats expérimentaux, le terme (Synr) décrit les performances de la commande synergétique conventionnelle, tandis que le terme (Synr-ESO) décrit les performances de la commande synergétique associée à l’ESO. La figure 3 montre que le couple appliqué par la commande (Synr-ESO) est inférieur à celui de la commande (Synr). En robotique, il est toujours préférable d’appliquer un couple plus faible pour obtenir le mouvement souhaité.

Figure 3. Mesures du couple appliqué dans le cas 3
L’erreur de suivi dans l’espace articulaire à la figure 4 montre que le (Synr-ESO) donne une meilleure réponse transitoire par rapport à (q1) et (q2), et un meilleur suivi par rapport à (q2) et (q3). Plus précisément, pour (q3), les performances de suivi du (Synr) oscillent, ce qui fait vibrer le bras robotique pendant qu’il suit la trajectoire souhaitée. Ce comportement peut endommager les pièces mécaniques du manipulateur.

Figure 4. Erreurs de suivi de l’espace articulaire dans le cas 3
Le même comportement se produit dans le suivi de l’espace de travail à la Figure 5, où le robot est incapable de dessiner le cône correctement par rapport à la commande (Synr-ESO).

Figure 5. Forme souhaitée de l’espace de travail du cas 3
Conclusion
Les résultats expérimentaux révèlent la supériorité de la commande synergétique ESO pour surmonter les incertitudes et perturbations sans nécessiter une connaissance complète de la dynamique et des états du robot, mais où seules les mesures de la position articulaire sont utilisées. Ainsi, le schéma de la commande proposée pourrait être une solution pour les systèmes sujets à des mesures bruitées et une modélisation imprécises. Simultanément, le schéma parvient à préserver les mérites fondamentaux de la commande synergétique et à atténuer sa contrainte inhérente de forte dépendance envers la dynamique du modèle et la nécessité d’un accès complet aux états du système.


