
Faciliter l'atterrissage des drones en estimant leur pose

Achetée sur Istockphoto.com. Droits d’auteur.
L’estimation de la pose est fondamentale dans la conception d’un système de commande de drone, ou véhicule aérien sans pilote (UAV). Elle vise à mesurer avec précision les axes et les directions d’un point précis : le centroïde du véhicule aérien, ou centre de masse. Ces mesures sont soit en translation, soit en rotation et peuvent fournir une rétroaction au système de commande pour diverses tâches (notamment le rendez-vous et l’atterrissage final) surtout en contexte difficile comme les environnements marins, où la plateforme d’atterrissage se déplace au gré des vagues.
Une méthode courante d’estimation de la pose est l’algorithme de détection AprilTag (ATDA). Afin d’atteindre une plus grande précision dans cette étude, nous avons combiné les données télémétriques des capteurs aux coins d’un marqueur AprilTag, détectés par ATDA, à l’aide d’une méthode CRHF (Camera and Range Sensor Homogeneous Fusion). Nous avons d’abord créé un algorithme d’étalonnage pour modéliser la relation entre les pixels et les distances pour les quatre capteurs télémétriques. Cette relation a servi à mesurer la distance focale à chaque itération. Ensuite, nous avons calculé l’emplacement 2D réel des points géographiques pour chaque coin (axes X et Y) grâce à des équations homogènes se basant sur la distance focale et les points d’angle des coordonnées en pixels. Le vecteur normal de la plateforme d’atterrissage a fourni les coordonnées de l’axe Z de chaque coin. Enfin, la technique de transformation des corps rigides a servi à trouver la pose réelle de l’AprilTag. L’évaluation de la CRHF a été effectuée au moyen de données de vérité terrain provenant de simulateurs et de l’ATDA.
Conception du système
Le concept comprend cinq capteurs. Quatre d’entre eux sont des capteurs télémétriques situés sous chaque hélice. Une caméra de résolution 512 × 512, orientée vers le bas, est fixée au centre de masse et aux capteurs télémétriques du drone.
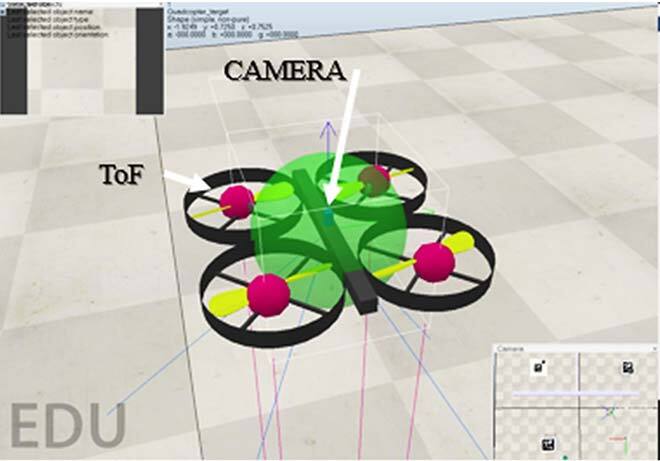
Figure 1 Emplacement des capteurs du drone – Estimation de pose par CRHF
En outre, la détection et la pose de départ ont été déterminées grâce à un marqueur AprilTag. De nos jours, les marqueurs comme AprilTag servent à diverses applications comme le positionnement, l’orientation et l’identification d’objets. Ils sont donc très efficaces dans l’industrie de la robotique. Dans cette recherche, le marqueur était un outil d’estimation de pose.
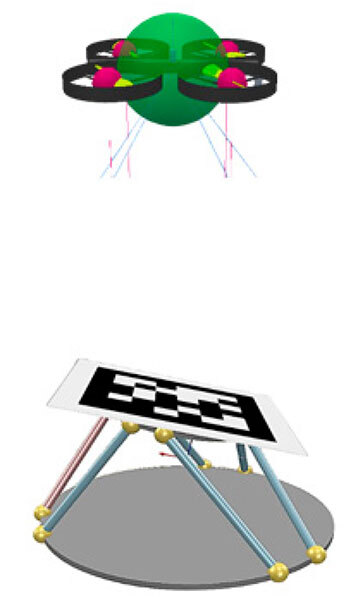
Figure 2 Placement de l’AprilTag sur la plateforme d’atterrissage dynamique
La figure 2 illustre la plateforme conçue pour le système d’atterrissage du drone. L’AprilTag est placé sur le système de plateforme dynamique Stewart qui simule la dynamique des mouvements marins. Le drone tente de mesurer la pose du marqueur, ici AprilTag, afin de déterminer le bon moment pour l’atterrissage final.
L’algorithme proposé
La caméra orientée vers le bas capte l’image de l’AprilTag. Toute distorsion de l’image est supprimée grâce aux paramètres intrinsèques de la caméra. Ensuite, les points d’angles de l’AprilTag sont calculés avec l’ATDA et suivis au moyen d’une technique de filtre de Kalman (KF). Une technique d’étalonnage de caméra et de capteur télémétrique appelée CRHF calcule l’emplacement des points d’angles de l’AprilTag dans les images de la caméra, sur les axes X et Y. Le vecteur normal de la plateforme d’atterrissage calculé à partir des quatre capteurs sert également à calculer l’emplacement sur l’axe Z.
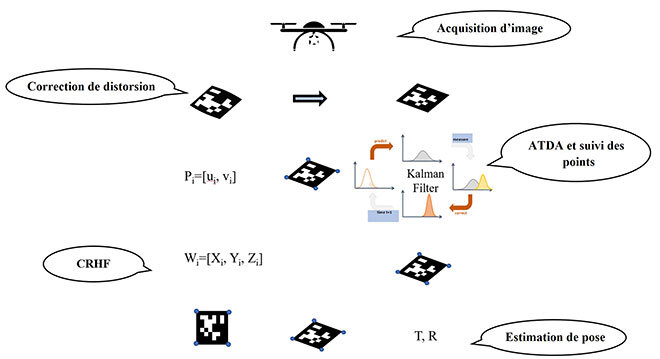
Figure 3 Schéma du procédé d’estimation de pose avec l’algorithme CRHF
Ces points projettent la pose rigide relative des coins par rapport au centroïde de la caméra, qui est le même que le centroïde du drone.
L’algorithme CRHF
L’étalonnage est réalisé par la collecte de données de la caméra et de données d’altitude des capteurs télémétriques. Les données d’altitude et les données du centre des blocs d’étalonnage sont déterminées à la même altitude : des images des blocs sont prises à chaque altitude et les centroïdes des blocs sont extraits par une technique de segmentation des couleurs.
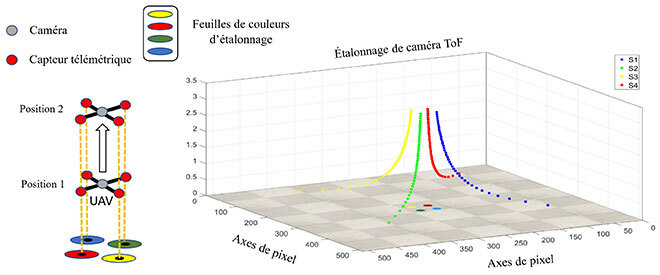
Figure 4 Procédé d’étalonnage de la caméra et des capteurs télémétriques
Ainsi, les données de chaque capteur télémétrique sont liées aux pixels du centroïde des blocs dans l’image. Enfin, les distances manquantes sont calculées au moyen de la technique d’interpolation de forme.
Le système d’évaluation résultant
Nous avons intégré les logiciels MATLAB et CoppeliasSim dans un logiciel en boucle (SIL) pour créer un écosystème d’évaluation. Alors que CoppeliaSim simule le monde physique, la session MATLAB est une réplique de l’ordinateur du drone.
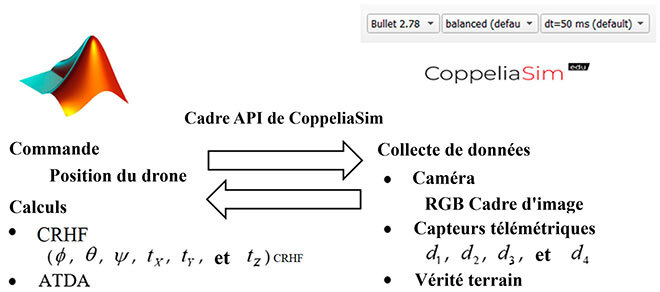
Figure 5 Transfert de données et calculs avec le logiciel en boucle
À la figure 5, la session MATLAB calcule la pose de la plateforme d’atterrissage à l’aide des algorithmes CRHF et ATDA à chaque itération. La session CoppeliaSim assure la collecte des données d’image, de distance et de vérité terrain. Les performances de l’ATDA et de CRHF ont été mesurées par la formule de l’erreur absolue moyenne (MAE). On calcule la MAE en additionnant la différence absolue entre la valeur observée (ou estimée) et la valeur réelle, divisée par le nombre d’itérations. Nous avons réalisé deux tests sur une plateforme statique et une plateforme très dynamique.
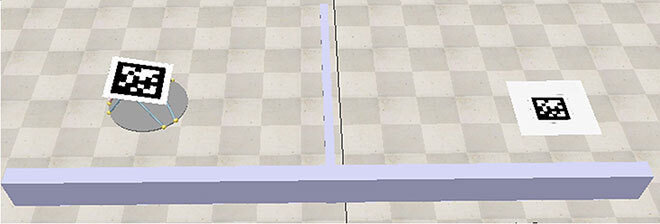
Figure 6 Plateformes d’atterrissage, statique (côté droit) et dynamique (côté gauche)
L’AprilTag est posé sur un sol stable pour le test statique et est fixé à une plateforme Stewart de 6 degrés de liberté (6 DoF) pour le banc d’essai dynamique, en figure 6.
Comparaison entre les algorithmes CRHF et ATDA
Nous avons évalué l’algorithme CRHF proposé pour améliorer l’ATDA en comparant les résultats avec la technique ATDA et les données de vérité terrain du simulateur.
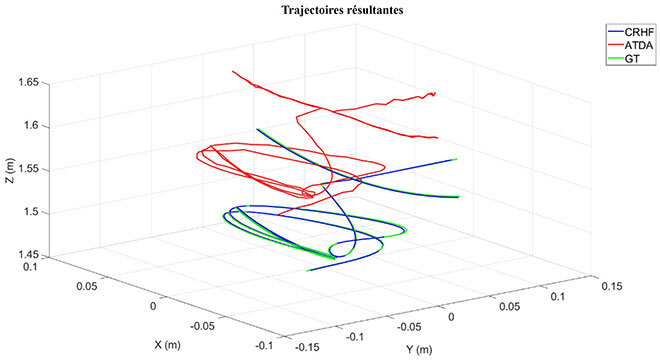
Figure 7 Trajectoires estimées pour la CRHF (bleu), la vérité terrain (vert), et l’ATDA (rouge)
Comme l’indique le tracé de la trajectoire 3D, la CRHF est nettement plus performante que la technique ATDA. Par contre, l’algorithme proposé a ses inconvénients, soit le coût de quatre capteurs télémétriques et leur poids ajouté au drone. De nos jours, les nouvelles technologies en matière de capteurs télémétriques permettent de réduire le coût et le poids de l’application, ce qui atténuera les aspects négatifs de la CRHF.

Tableau 1 : Comparaison des performances entre ATDA et CRHF – Erreur absolue moyenne (MAE)
Le tableau 1 présente les erreurs absolues moyennes des méthodes ADTA et CRHF.
Information supplémentaire
Pour plus d’informations sur cette recherche, veuillez lire l’article suivant : Sefidgar, Mohammad, and Rene Landry Jr. 2022. “Unstable Landing Platform Pose Estimation Based on Camera and Range Sensor Homogeneous Fusion (CRHF)” Drones 6, no. 3:60. https://doi.org/10.3390/drones6030060.


