
Des équipes de robots pour faciliter l’exploration spatiale

Essaims d’aéronefs autonomes à Lanzarote, Espagne (©Marcel Kaufmann)
Des essaims de drones qui s’organisent
Depuis le début de l’exploration spatiale, Mars et la Lune ont été explorées à partir de leur orbite ou grâce à des véhicules autonomes de surface : plus d’une quarantaine de missions ont ciblé Mars et plus d’une centaine, la Lune. L’intérêt confirmé de plusieurs agences spatiales d’installer des infrastructures permanentes sur ces corps célestes accentue l’importance de ces missions d’exploration et la précision attendue de leur cartographie. La navigation dans des cratères, des crevasses et des tunnels est particulièrement importante pour visiter des endroits impossibles à visualiser en orbite. Les équipes de robots, ou essaims robotiques, sont particulièrement prometteuses pour l’exploration planétaire, car elles sont plus robustes contre la défaillance individuelle et ont le potentiel d’explorer collectivement de plus grandes zones; cependant, un pilote seul est limité quant au nombre d’unités qu’il peut télécommander. En effet, le pilotage de plus de quatre aéronefs en simultané a été démontré comme étant exigeant, même pour des pilotes expérimentés. Les essaims offrent cependant la possibilité de considérer toutes les unités comme une seule entité « groupe ».
Un essaim robotique est généralement caractérisé par l’absence de nœud de contrôle central : la commande est basée sur les interactions locales entre voisins et celles avec l’environnement immédiat. Si un membre de l’essaim devient hors service, le groupe doit être en mesure de se réorganiser pour poursuivre la mission. Ce type de contrôle a le potentiel d’être beaucoup plus robuste et flexible face aux imprévus en cours de mission et aux environnements dynamiques, mais c’est aussi un paradigme de programmation beaucoup plus complexe à déployer et moins intuitif à opérer.

Quadricoptère Spiri fabriqué par l’entreprise canadienne Pleiades (©Benjamin Ramtoula)
Étudier les facteurs humains influençant le pilotage
En 2018, un essaim robotique a été testé lors de la campagne interdisciplinaire de tests d’équipements de l’Agence Spatiale Européenne (PANGEA-X) sur un site analogue aux paysages lunaire et martien, à Lanzarote, en Espagne. L’objectif était d’y déployer une flotte de véhicules aériens sans pilote (UAV) variés – un essaim hétérogène – pour étudier l’influence de certains facteurs humains sur le pilotage durant l’exploration spatiale. Les pilotes ont dirigé l’essaim volant vers des zones à explorer pour révéler des formations géologiques particulières (simulées) selon deux modes d’exploration : l’un où chaque robot reçoit des instructions spécifiques et l’autre, où seulement des orientations générales sont transmises à l’essaim, qui s’organise pour effectuer la mission. L’intelligence de l’essaim consiste à assurer la navigation de chaque robot de manière à optimiser les recherches autour des points d’intérêts donnés par le pilote. Cette assignation est possible grâce à une couche réseau qui se charge de l’échange robuste d’information dans l’essaim ainsi qu’à des mécanismes de consensus. Par exemple, lorsque l’un des robots (peu importe lequel) se voit assigner une nouvelle zone à explorer par le pilote, l’essaim doit déterminer la formation géométrique qu’il adoptera pour s’y rendre et la balayer.
L’infrastructure de programmation nécessaire pour simuler et déployer un système robotique de cette complexité de même que les couches réseau gérant la communication entre unités ont été fournies par le professeur Beltrame et son équipe de Polytechnique Montréal. Le contrôleur décentralisé, les stratégies de consensus au sein de l’essaim et les commandes intuitives de la flotte manipulées par le pilote sont les problématiques principales auxquelles s’intéresse le laboratoire INIT Robots.
C’est seulement lorsque tous les robots ont confirmé qu’ils ont le même plan de vol et qu’ils sont prêts à l’exécuter que l’essaim passe à l’action. Cette possibilité pour l’essaim de se reconfigurer à volonté, à partir d’échanges internes et de manière réactive à l’environnement et aux instructions reçues, peut exacerber le caractère abstrait de l’entité « groupe » et alourdir l’interaction. Sans compter que dans un contexte d’exploration spatiale, les astronautes doivent en parallèle alimenter la communication avec d’autres équipes; l’accumulation de ces tâches devient extrêmement exigeante cognitivement.

L’astronaute allemand Matthias Maurer affairé au pilotage d’un essaim d’aéronefs au côté du professeur David St-Onge (©ESA).
Évaluation de la charge mentale par oculométrie
En science de l’information, la charge cognitive est un concept informatique voulant que l’effort mental ait une forte influence sur les performances de l’opérateur. Pour tout système informatique, dont la téléopération robotique, les opérateurs doivent continuellement réguler (adapter) leur effort mental pour améliorer leurs performances. En psychologie, on considère souvent la charge cognitive comme une mesure de l’attention disponible. Cette mesure est essentielle à la validation d’une interface de commande, mais les méthodes traditionnelles permettant de mesurer l’effort mental des opérateurs sur la base de leur propre évaluation subjective, telles que le questionnaire NASA TLX (Task Load Index), sont limitées, voire biaisées.
Pour chacune des deux stratégies d’exploration testées à Lanzarote, nous avons évalué la charge cognitive par oculométrie ainsi que la complexité perçue des tâches et l’intuitivité des commandes par questionnaires. L’oculométrie utilise des mesures de la pupille, soit son mouvement et sa dilatation. Il a été démontré que les dilatations observables à haute fréquence (au-dessus de 150 Hz) peuvent être reliées à la charge cognitive : plus la pupille est dilatée, plus la tâche est exigeante. Nos résultats montrent, comme attendu, que l’utilisation d’une plus grande autonomie, grâce à l’intelligence en essaim, peut réduire la charge cognitive, libérant l’opérateur pour d’autres tâches, telles que les suivis stratégiques et les communications. Au-delà de ces observations, nous avons démontré la faisabilité de déployer un système d’évaluation, en temps réel, de la charge cognitive sur le terrain pour le pilotage d’aéronefs. Nos travaux futurs permettront de tirer parti des progrès de l’intelligence en essaim et des technologies de mesures cognitives pour d’autres types de missions et d’autres modalités d’interaction.
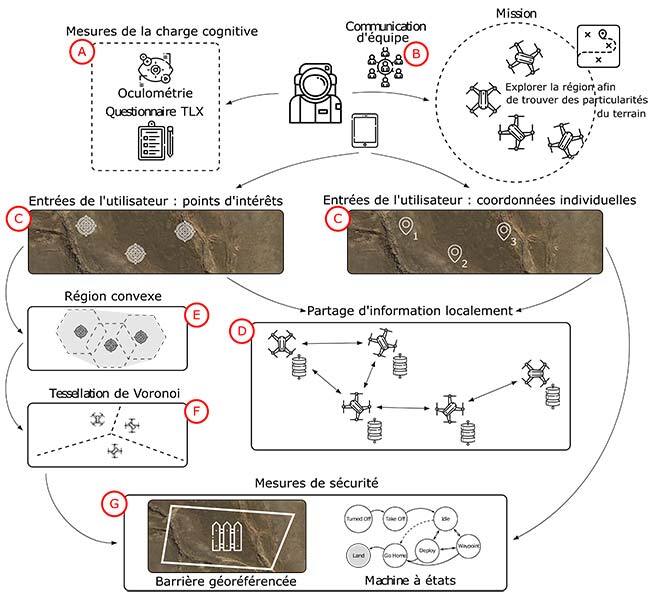
Schéma de l’expérience à Lanzarote : A- Mesures de la charge cognitive utilisées, B- Communications avec une équipe simulée, C- Mode de commande des aéronefs (gauche, en essaim, droite, individuel), D- l’échange d’information décentralisée, G- les mécanismes assurant la sécurité du déploiement des aéronefs avec finalement E et F illustrant l’algorithme de recherche autonome.


