L'ÉTS vous donne rendez-vous à sa journée portes ouvertes qui aura lieu sur son campus à l'automne et à l'hiver : Samedi 18 novembre 2023 Samedi 17 février 2024 Le dépôt de votre demande d'admission à un programme de baccalauréat ou au cheminement universitaire en technologie sera gratuit si vous étudiez ou détenez un diplôme collégial d'un établissement québécois.
En codirection avec : Hausler, Robert UV-Spectrum Remote UVA Imaging for Use in Precision Agriculture, par Heath,Megan Été 2023
En codirection avec : Iordanova, Ivanka Robot Navigation on Construction Sites Using Building Information Modeling and Geographic Information System, par Karimi,Sina Été 2021
En codirection avec : Belzile, Bruno Outils pour le déploiement terrain d'un groupe de robots sphériques, par Bonnaud,Simon Été 2024
En codirection avec : Exploration en essaim robotique intégrant un retour visuel pour l'opérateur, par Boucher,Corentin Été 2022
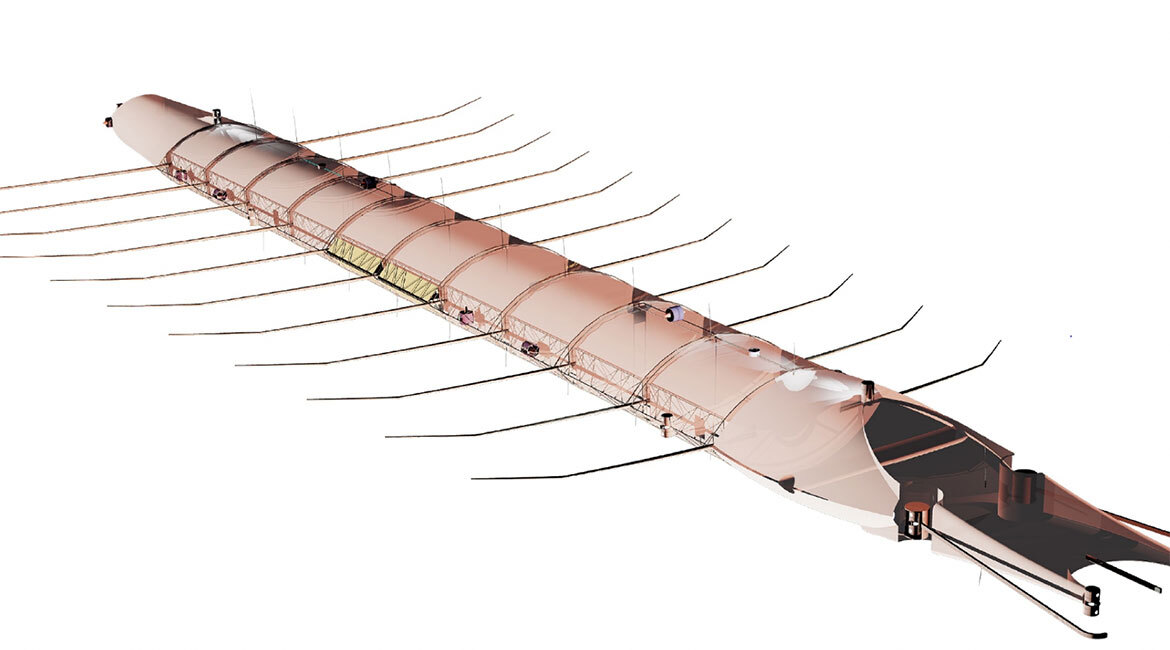
En codirection avec : Tabiai, Ilyass Modeling of the Membrane Load Effects on the Structural Elements of a Small Airship, par Kheirani,Afsaneh Hiver 2024
En codirection avec : Iordanova, Ivanka Automated Monitoring of Construction Site Progress Using Mobile Robotic Platforms,
Computer Vision-Based Techniques and IoT, par Heydarian,Sina Hiver 2024
En codirection avec : Saad, Maarouf Atterrissage autonome d'un drone à voilure fixe VTOL sur une plateforme mouvante, par Gérard,Paul Hiver 2024
En codirection avec : Localisation et génération de trajectoires pour l'exploration de caverne avec des micro-véhicules aériens équipés de capteurs limités, par Desbiens,Raphael Hiver 2024
En codirection avec : Leveraging Human-Provided Semantic Knowledge and Cooperative Localization for Autonomous Mobile Robots in Dynamic Environments, par Gomes Braga,Rafael Été 2024
En codirection avec : Saad, Maarouf Contrôle non linéaire de robots sphériques non holonomes à des fins d'exploration spatiale, par Diouf,Aminata Automne 2023
En codirection avec : An Analytical Approach to Safe Collaborative Assembly Station with Cobots, par Montazer Zohour,Hamed Automne 2022
En codirection avec : Iordanova, Ivanka Déploiement sécuritaire des robots mobiles en chantier de construction, par Wanang Siyapdjie,Tatiana Automne 2020
En codirection avec : Analyse de l'importance des facteurs de risques cognitifs chez les opérateurs d'aéronefs professionnels, par Profir,Cleopatra Hiver 2024
En codirection avec : Beltrame, Giovanni Architecture de communication d'un essaim de micro-drones, par Lefi,Safa Hiver 2022
En codirection avec : Iordanova, Ivanka Automatisation du suivi de l’avancement au chantier par l’usage d’un rover autonome, des données du slam et de balises, par Marcy,Léo Été 2021
En codirection avec : Tabiai, Ilyass Caractérisation des performances mécaniques en flexion trois points et en compression des pièces FDM non-planaires, par Ouedraogo,Ismael Eddie Été 2022
En codirection avec : Ebrahimi-Kahou, Samira Swarm Robots Collision Avoidance and Navigation via Model-based Reinforcement Learning, par Abdalwhab,Abdalwhab Bakheet Mohamed Été 2024
En codirection avec : Tabiai, Ilyass Procédure de fabrication de micro-treillis polymères pour l'aérospatiale, par Catar,Louis Été 2024
En codirection avec : Saad, Maarouf Dynamic Modelling and Control of a Multibody Indoor Airship for Teleoperation, par Salas Gordoniz,Jorge Esteban Été 2024
En codirection avec : Iordanova, Ivanka Detection of Equipment and Workers to Enchance Safety and Increase Productivity in Construction Site Monitoring, par Tahir,Muhammad Owais Hiver 2024
En codirection avec : Beltrame, Giovanni Development of a Worker-Aware Safe Path Planner for an Industrial Mobile Manipulator Swarm, par Imran,Ali Été 2024
En codirection avec : Tabiai, Ilyass Banc de résistance d'une coque de protection d'un drone aérostat, par Hzami,Ilyes Été 2022
En codirection avec : Déploiement d'une solution CAO pour faciliter le travail d'équipe en PME, par Di Giacomo,Matthis Été 2023
En codirection avec : Resende, Paulo Adaptation d'un algorithme calculant la probabilité d'un conduteur de provoquer un accident de voiture, par Guéguen,Léa Hiver 2023
En codirection avec : Awada, Houssein Conception d'une salle de finition du bois robotisée incluant l'adaptation d'un cobot, par Bentakkouk,Mohamed Automne 2022
En codirection avec : Conception et développement d'un système de saut pour un robot en micro-gravité, par Filiatrault,Marc Hiver 2022
En codirection avec : Tabiai, Ilyass Conception d'un mécanisme actionné pour l'impression SLA multi-résines, par Wadoux,Pierre Été 2023
En codirection avec : Analyse de données de vol pour la fatigue, par Wadoux,Pierre Été 2023
Corentin Boucher, Rafael Gomes Braga, Jorge E. Salas Gordoniz, Nerea Urrestilla Anguiozar, Hamed Montazer Zohour, Alexandre Duval, David St-Onge. 2021 « Conveying information with groups of robots through expressive motion ». Affiche présentée lors de la conférence : Workshop on Robot Swarms in the Real World at ICRA 2021 (En ligne, June 4, 2021)
David St-Onge, Vivek Shankar Varadharajan, Giovanni Beltrame. 2017 « Swarming in ROS : from design to practical deployment ». Affiche présentée lors de la conférence : 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (Vancouver, BC, Canada, Sept. 24-28, 2017)
D. St-Onge, G. Beltrame. 2016 « UAV swarms for emergency response ». Affiche présentée lors de la conférence : 6th NorthEast Robotics Colloquium (Ithaca, NY, USA, Oct. 29-30, 2016)
Vivek Shankar Varadharajan, David St-Onge, Bram Adams, Giovanni Beltrame. 2020 « SOUL: data sharing for robot swarms ». Autonomous Robots vol. 44. p. 377-394
David St-Onge, Nicolas Reeves, Philippe Giguère, Inna Sharf, Gregory Dudek, Ioannis Rekleitis, Pierre-Yves Brèches, Patrick Abouzakhm, Philippe Babin. 2015 « AEROSTABILES: A new approach to HRI researches ».